上次我們發佈 rrxv6 的文章,已經是 2021 年 12 月的事情了,已經是去年了,大家可能以為我已經棄更了?
其實沒有的,只是跟上次的 virtual memory 一樣卡關了。
1-2 月的時候,台北的天氣鳥得跟好市多的冷藏區一樣,冷就算了還天天下雨,起床之後在雨聲裡開工,中餐晚餐撐傘出去買飯,
在雨聲裡睡午覺,在雨聲裡說晚安,房間除溼開整天,到後來整個人都覺得不對勁了,還小病了一場一個星期捅了三次鼻孔;
二月俄烏又開戰幹普丁還我錢,有大事的時候真的會忍不住一直嘗試更新資訊,然後工作效率就降到低點QQ,
直到三月吸飽太陽能之後有好一點點。
參考資料
前情提要結束了,反正總之就是嚴重卡關。
這次是卡哪裡呢,就是卡 process 跟 scheduler,和 memory management 和 ipc 並稱作業系統三大核心功能果然不簡單; 因為 Rust Mutex 的實作方式,如果照抄 xv6 的寫法,context switch 之後會直接 deadlock,還不是兩個 processes deadlock, 是 context switch 前後的同一個 process 自己 deadlock。
我遇到的問題就是如何設計一個如同 xv6 用的 multicore 的 scheduler,雖然…xv6 的實作不是很有效率, 可以 O(1) 的東西寫成 O(n),而且不會 preempt(preempt 的 scheduler 是作業 ), 就是第一個 process 一直跑下去,
因此我訂的目標是,要寫一個 multicore 可用的 scheduler,至少要有 preempt 的功能,效率…不要太差;
期間看了不少其他的文章與 code 當參考,雖然沒有一個有真正解決到我的問題可以讓我直接抄作業,以下條列:
- Blog os cooperative multitasking :用 rust 本身支援的語言特性 async/await 來實作協作式多工,這篇很精彩,但對我來說沒什麼用就是。
- FreeRTOS scheduler :作為參考,C 語言的實作也看一下,但因為它沒有虛擬記憶體,所以對我的幫助也有限。
- Tock os scheduler :這是完成度最高的,內部結構錯綜複雜,trace 了好一陣才稍稍看懂。 它很帥氣的把 scheduler 弄成一個 trait,不同的 schedule policy 只是 trait 不同的實作,本篇使用 Linked List 也是學這邊的。
xv6 rust 實作的問題
讓我們先試著重現 xv6 的 scheduler 函式:
void scheduler(void)
{
struct proc *p;
struct cpu *c = mycpu();
int found_running_process = 0;
c->proc = 0;
for(;;) {
intr_on();
found_running_process = 0;
for(p = proc; p < &proc[NPROC]; p++) {
acquire(&p->lock);
if(p->state == RUNNABLE) {
found_running_process = 1;
p->state = RUNNING;
c->proc = p;
swtch(&c->context, &p->context);
c->proc = 0;
}
release(&p->lock);
}
if (found_running_process == 0) {
intr_on();
asm volatile("wfi");
}
}
}
簡單來說,它所有可以跑的 process 都放在 proc[NPROC] 裡面,CPU 會一個一個 process 進去看,
如果找到狀態為 RUNNABLE 的 proc,就設定一下狀態然後拿出來跑,因為同時會有多個 CPU 執行這個函式,proc 會透過 Mutex lock 起來。
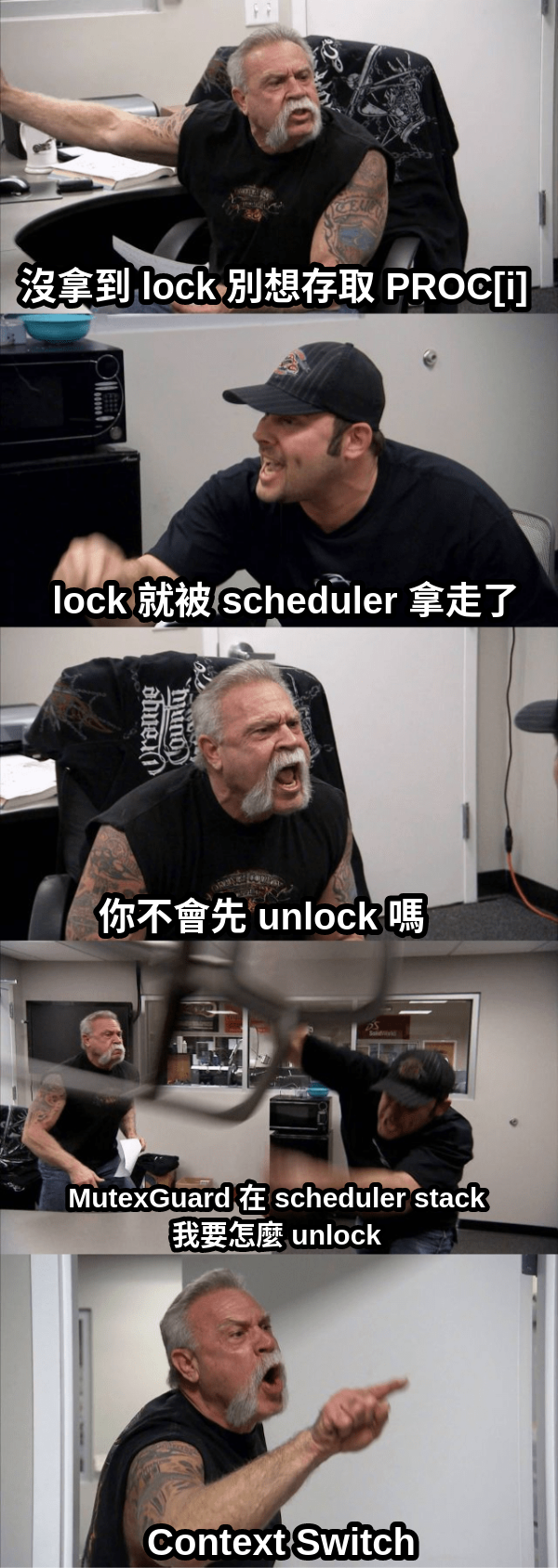
但問題就在這個 Mutex,如果我照抄的話,儲存行程的型態就會變成 [Mutex<Proc>],直接改寫會類似:
for i in 0..NPROC {
mut proc = PROC[i].lock();
if proc.state == ProcState::RUNNABLE {
found_process = true;
proc.state = ProcState::RUNNING;
*cpu.proc.lock() = Some(i);
unsafe {
switch(&cpu.context as *const Context,
&proc.context as *const Context);
}
}
把 proc 的 index 存在 cpu 裡面,這樣要回來的時候可以從 index 取得它在執行的 proc,再呼叫 switch 把執行狀態存回去。
問題在於:
mut proc = PROC[i].lock();
這行,Mutex 已經被 scheduler 拿走了,switch 的時候並不會自動解鎖這個 Mutex,所以 process 執行完, 要 context switch 取得 PROC[i] 的 Mutex 時就會直接 deadlock。
具體可以用下面這張圖解釋:
可行的實作
誠實地說,我下面這個實作也就只是 可行 而已,和能用的成品相去甚遠,大體來說就是會動有動六十分。
未來有高機率會需要改動設計。
這次的實作有三個要點:
- scheduler 和 data struct 息息相關,要實作有效率的 scheduler,就得用上 list , 而不是如 xv6 一樣用一個靜態的 array 來儲存所有的 process;雖然在 rust 上實作 list 相對來說麻煩一點, 但幸好這部分有 Too Many Linked Lists 可以參考。
- 跟上次實作 Context 的時候一樣,我們需要用到 global data, 為了避免 context switch 前後互相競爭,這次 global data 就不能用 Mutex 了,存取也都會變成 unsafe,但…… 我就 unsafe。
- 同樣,為了持有一些資料的 reference,我們必須使用 pointer,這在 rust 裡也是 unsafe。
讓我們開始吧:
Process
上一次我們用的是直接把函式的 context 準備好塞進 scheduler 裡,這回我們用 Process 把它包起來; 初始的 Process 先加上 state、context、stack address 跟 pid 即可:
#[derive(Eq,PartialEq)]
pub enum ProcState {
RUNNABLE,
RUNNING,
}
pub struct Proc {
pub state: ProcState,
pub context: Context,
pub kstack: u64,
pub pid: usize,
pub name: [char;LEN_PROCNAME],
}
process stack
xv6 會生成多個 kernel process,可以透過設定檔的 NPROC 來設定,在 kernel 初始化的時候會先分配好它們需要的記憶體; xv6 的設計是分配在 virtual address 頂部的地方:
pub fn kstack(proc_id: u64) -> u64 {
TRAMPOLINE - (proc_id + 1) * 2 * riscv::PAGESIZE
}
在初始化 virtual memory 的時候,要分配好實體記憶體並做好映射:
// alloc and map stack for kernel process
for i in 0u64..NPROC as u64 {
let ptr = kalloc();
if ptr == 0 as *mut u8 {
panic!("kalloc failed in alloc proc stack");
}
let pa = PhysAddr::new(ptr as *const _ as u64);
let va = VirtAddr::new(kstack(i));
kvmmap(va, pa, PAGESIZE, PteFlag::PTE_READ | PteFlag::PTE_WRITE);
}
scheduler
tock os 的實作
scheduler 的部分主要是參考 tock os 的設計,雖然沒那麼簡潔,但還是儘量預留未來改為 trait 並允許不同實作的空間:
tock os 的 scheduler 只有五個介面函式:
- next:請 scheduler 決定下一個要執行的 process。
- result:通知 scheduler 上一個函式結束執行的原因。
後面這三個比較不重要,一般都是沿用標準的實作:
- do_kernel_work_now:詢問 scheduler 是否要中斷 user process 以執行 kernel task。
- continue_process:詢問 scheduler 是否要繼續執行同一個 process。
- execute_kernel_work:要求 scheduler 排程執行 kernel-level work,像是處理 bottom-half interrupt; 特殊的 scheduler 可能會優先執行 task 以符合時間的需求。
至於一個 scheduler 的實作裡面要怎麼管理 process 那是它家的事,總之這幾個介面設定好就好。
tock os 的 process 是在 kernel 裡儲存一個 static 的 process array;scheduler 則擁有這個 array 的 reference,
scheduler 會透過 process id 來指定要跑哪個 process 。
我的實作
我們仿造它的實作,先弄出一個 scheduler 的 struct,但我們把 process 都塞進 scheduler 裡面由 scheduler 來管,稍微簡單一點。
先設立好 scheduler global variable 的空間,這一套應該是標準做法了
static mut SCHEDULER: Option<Scheduler> = None;
pub struct Scheduler {
pub used: Mutex<List<Box<Proc>>>,
pub unused: List<Box<Proc>>
}
pub fn get_scheduler() -> &'static mut Scheduler {
unsafe {
SCHEDULER.as_mut().unwrap()
}
}
pub fn init_scheduler() {
unsafe {
SCHEDULER = Some(Scheduler::new());
}
}
現在可以實作函式 init_proc 了,生成 NPROC 個 Proc,kstack 設定為先前映射好的 virtual address,
最後把它塞進 scheduler 的 unused list 裡。
pub fn init_proc() {
let scheduler = get_scheduler();
for i in 0..NPROC {
let mut proc = Box::new(Proc::new(
kstack(i as u64)
));
scheduler.unused.push(proc)
}
}
spawn
初始化行程設計為 scheduler 的一個函式,比起 tock os scheduler 這是多出來的;具體包含:
- 從 unused list 中取得一個 process 物件
- 向 Atomic 的 static variable 取得 pid
- 設定 state 為 RUNNABLE
- 重設 context 之後,設定 stack pointer sp 為 kstack + PAGESIZE(riscv 的 stack 是 grow downward); return address 為 spawn 傳進來的函式位址 f。
- 將設定好的函式插入 scheduler 的 used list 中。
pub fn get_pid() -> usize {
static PID_GENERATOR: AtomicUsize = AtomicUsize::new(0);
PID_GENERATOR.fetch_add(1, Ordering::Relaxed)
}
pub fn spawn(&mut self, f: u64) {
match self.unused.pop() {
Some(mut proc) => {
// initialize process
proc.pid = get_pid();
proc.state = ProcState::RUNNABLE;
proc.context.reset();
proc.context.ra = f;
proc.context.sp = proc.kstack + PAGESIZE;
let mut used_list = self.used.lock();
used_list.push(proc);
},
None => {
panic!("No unused process left");
}
}
}
有了 spawn 函式,在 main 裡面我們就能把剛剛的東西都加進去,我們 spawn 兩個 printA 跟 printB 函式,分別印出 A 跟 B:
let scheduler = get_scheduler();
scheduler.spawn(print_a as u64);
scheduler.spawn(print_b as u64);
// start scheduling, this function shall not return
scheduler.schedule();
fn print_a() {
loop {
println("A");
}
}
fn print_b() {
loop {
println("B");
}
}
static CPU
作業系統在執行的時候,從 CPU 的角度來看是這樣子的:
- 執行到 scheduler,選出下一個要執行的 process,包括它所有的 registers 即 context。
- 將 CPU 上現有的狀態存入記憶體的某個地方。
- 從要執行的 process 狀態,載入到 CPU 上;2-3 步就是所謂的 context switch。
- 這時候 CPU 會立即 開始執行 process,記住 CPU 是一刻都不會停的,register 指到哪就跑哪裡。
- 無論是 process 自行放棄或是因為 interrupt,2-3 的步驟會反過來執行一次,CPU 即回到 scheduler 上。
為了儲存 Process 的狀態,上面的 Proc struct 裡面會有對應的 Context;
而在執行 process 時,每個 CPU 都會有一個空間去放原有的狀態,這就是我們拋棄節操的地方了。
在 CPU 要從 Process 回到 kernel scheduler 時,它需要把現在的狀態,存回到 Proc struct 裡面,
這表示 CPU 必須持有執行中 Proc 的 mutable reference,為此我們需要使用 rust 的禁忌招式:pointer。
pub struct Cpu {
pub proc: * mut Box<Proc>, // pointer to process running on this cpu
pub context: Context,
}
static mut CPU: [Option<Cpu>;NCPU] = {
const INIT_CPU: Option<Cpu> = None;
[INIT_CPU;NCPU]
};
pub fn init_cpu() {
for i in 0..NCPU {
unsafe {
CPU[i] = Some(Cpu::new());
}
}
}
Context Switch
現在我們可以來實作 Context switch 了,跟之前簡略的實作 沒差很多,
實作 next 介面,從 used list 裡面敲出下一個要執行的 process,由於 scheduler 會在多個 CPU 之間共享, 要修改 used_list 的時候,必須要搭配 Mutex lock,取出 Proc 之後立即解鎖,這樣它就不會卡到其他 CPU 的執行:
pub fn next(&self) -> Option<Box<Proc>> {
let mut used_list = self.used.lock();
used_list.pop()
}
上面用到的 schedule 函式:
- 把 interrupt 打開
- 呼叫 next 看看有沒有要執行的 process,沒有就直接進入休眠。
- 拿到要執行的 process,設定它的狀態為 RUNNING,將 pointer 寫入 CPU struct。
- 呼叫 assembly 的 switch 執行 context switch。
- 當 CPU 回到這裡(在 preempt 或 process 主動放棄執行),把這個 process 塞回 used list 裡,等待下一次被執行。
pub fn schedule(&self) -> ! {
loop {
intr_on();
match self.next() {
Some(mut proc) => {
let cpu = get_cpu();
proc.state = ProcState::RUNNING;
unsafe {
cpu.proc = &mut proc as *mut Box<Proc>;
switch(&mut cpu.context as *mut Context,
&mut proc.context as *mut Context);
}
let mut used_list = self.used.lock();
used_list.push(proc);
},
None => {
intr_on();
wfi();
}
}
}
}
另外我們必須實作 yield_proc 函式(不叫 yield 是因為它是 rust 的關鍵字),讓 Proc 可以主動放棄 CPU 執行權。
yield_proc 會從 cpu 裡面拿到 process 的 pointer,將狀態改回 RUNNABLE,再呼叫 switch 與 cpu 內部自己的 context
(停在 scheduler 內呼叫 switch 時的狀態)交換。
pub fn yield_proc() {
let cpu = get_cpu();
unsafe {
let mut proc = &mut *cpu.proc as &mut Box<Proc>;
proc.state = ProcState::RUNNABLE;
cpu.proc = null_mut();
switch(&mut proc.context as *mut Context,
&mut cpu.context as *mut Context);
}
}
Preempt Multitasking
到這裡我們的 scheduler 已經能做到 cooperative multitasking 了,只要在 print_a/b 裡面呼叫 yield_proc 即可。
不過要改造成 preempt 也很簡單,我們在上一章 interrupt
已經處理好 interrupt,
搭配在 start 的時設定好了 machine mode timer interrupt
。
這一串 interrupt 及其處理流程整理如下:
- init_timer 設定 qemu clint (Core local interruptor),設定對應的 timer setting,讓外部 timer 發中斷給 riscv hart。
- init_timer 設定 CSR mtvec (Machine Trap-Vector Base-Address Register),指定 machine trap 的 handler。
- init_timer 設定 CSR mstatus (Machine-mode status register) 及 mie (Machine-mode Interrupt Enable),讓外部 interrupt 能產生中斷。
- 在 timer trap handler,重新設置 timer 並呼叫 csrw 設定 sip (Supervisor Interrupt Pending) 的 SSIP (Supervisor Software Interrupt Pending) 位元。
# raise a supervisor software interrupt.
li a1, 2
csrw sip, a1
- 在 start 函式裡已經設定 sie (Supervisor Interrupt Enable) 開啟 Software Interrupt 。
- 呼叫 intr_on 時設定 sstatus (Supervisor Status Register),開啟 Supervisor mode interrupt。
- interrupt 發生,從 stvec 取出 handler kernelvel,保存 register 至 stack 上。
- 呼叫 rust 函式 kerneltrap。
在 kerneltrap,透過 scause 知道現下是哪個 interrupt 或 exception,若發生的是 Supervisor-mode Software Interrupt, 呼叫寫好的 yield_proc 即可。
fn handle_software_interrupt() {
if get_cpuid() == 0 {
tick();
}
let mut sip = Sip::from_read();
sip.clear_pending(1);
sip.write();
let proc = get_proc();
unsafe {
if !proc.is_null() && (*proc).state == ProcState::RUNNING {
yield_proc();
}
}
}
之所以必須要檢查 proc pointer 是不是 null,是設計的關係。
只要 machine-mode 曾經把 sip 設 pending,在 intr_on 打開 sstatus 的瞬間 timer interrupt 就會被觸發,
在上述 schedule 函式呼叫 switch 進行 context switch 之前就進到 interrupt handler,cpu.proc 就會指向 null pointer。
與之相對的如 FreeRTOS 的 ARM CM3 設計,在函式 prvStartFirstTask,它會先設定好 process pointer 之後,
再使用 cpsie 打開 interrupt,因此在 interrupt handler 就完全不用檢查持有的 process 是否為有效。
測試
測試其實沒有很複雜,qemu 執行下去就會看到畫面上交錯印出 A 和 B。
這不禁讓我回想起很久很久以前,那時候小弟還很菜剛學會用 Linux,從傳說中的強者我同學 AZ 大大那邊借了一本 鳥哥的私房菜 回來讀, 開頭介紹 linux 歷史的地方 有如下敘述:
他寫了三個小程式,一個程式會持續輸出A、一個會持續輸出B,最後一個會將兩個程式進行切換。他將三個程式同時執行, 結果,他看到螢幕上很順利的一直出現ABABAB……他知道,他成功了! ^_^
對啦我也成功了,卡關三個月才進展這樣一點點,啊不就好棒棒。
結論
卡關三個月,記得那時出去買飯,一直在想到底要怎麼寫,才能在 rust 裡面實作 preempt multitasking,花時間 trace tock os 的 code 什麼的。
最後的結論就是別傻了,什麼不要 unsafe,不要 pointer,只是讓自己被編譯器幹到懷疑人生。
我就用 pointer,我就 unsafe,畢竟寫 OS 本身就是一件危險的事,unsafe 是避不過的,也是 OS 把 unsafe 的事都做完了,我們才能無憂無慮安全的用電腦,不用擔心沒事把硬體搞爆。
這章實在比預想還要長一些,下一章預期要進入 User process 與 syscall 啦。