我們的最小程式現在能進到 reset_handler 了,但重要的是能進到使用者寫的 main 函式,不然這個 kernel 也沒用。 我們先把我們的 main.rs 改成 lib.rs,rt 編成 library 之後,類似 FreeRTOS 的感覺,再搭配使用者寫的 main.rs 編成完整的執行檔; 使用者寫的 main.rs 可以呼叫 kernel 提供的服務函式。
binary to library
mv src/main.rs src/lib.rs
新的 lib.rs 內容如下,移除開頭的 #![no_main],library 也不管有沒有 main 函式:
#[no_mangle]
pub unsafe extern "C" fn reset_handler() -> ! {
extern "Rust" {
fn main() -> !;
}
main()
}
pub static RESET_VECTOR: unsafe fn() -> ! = reset_handler;
我們宣告了 extern 的 main 函式並在 reset_handler 呼叫它,因為我們外部的 main 函式會被判定為 unsafe 函式, 因此 reset_handler 跟 RESET_VECTOR 的型別都要加上 unsafe。
build script
因為 linker 會搜尋 linker script 的位址,這個 linker script 是位在 kernel 而不是應用程式端, 這裡作者是使用 build script ,把 linker.ld 加到編譯之中。
use std::{env, error::Error, fs::File, io::Write, path::PathBuf};
fn main() -> Result<(), Box<dyn Error>> {
// build directory for this crate
let out_dir = PathBuf::from(env::var_os("OUT_DIR").unwrap());
// extend the library search path
println!("cargo:rustc-link-search={}", out_dir.display());
// put `linker.ld` in the build directory
File::create(out_dir.join("linker.ld"))?.write_all(include_bytes!("linker.ld"))?;
Ok(())
}
現在使用者可以另外開一個 project app,並提供 main 函式的實作,Cargo.toml dependancy 新增 rt:
[dependencies]
rt = { path = "../rt" }
把我們寫好的 cargo config 複製過來:
cp -r ../rt/.cargo .
本來 main.rs 的實作移到 app 的 main.rs
#![no_std]
#![no_main]
extern crate rt;
#[no_mangle]
pub fn main() -> ! {
let _x = 42;
loop {}
}
編譯測試
一樣在 app 內呼叫 cargo build 就可以編譯完成,用 objdump 觀看編譯結果:
arm-none-eabi-objdump -d target/thumbv7m-none-eabi/debug/app
target/thumbv7m-none-eabi/debug/app: file format elf32-littlearm
Disassembly of section .text:
00000008 <main>:
8: b081 sub sp, #4
a: 202a movs r0, #42 ; 0x2a
c: 9000 str r0, [sp, #0]
e: 2000 movs r0, #0
10: b001 add sp, #4
12: 4770 bx lr
00000014 <reset_handler>:
14: b580 push {r7, lr}
16: 466f mov r7, sp
18: f7ff fff6 bl 8 <main>
1c: defe udf #254 ; 0xfe
type safety
原書裡有一個小章節是在講 main 函式的 type safety issue
,
現在的寫法 app main 如果型別不是 fn() -> !,編譯仍然會通過,這會造成未定義行為。
雖然為什麼編譯會過這件事實在很謎,但原書提供了一個 macro 的解法,讓 main 函式在定義時透過 macro 進行一次型別檢查。
不過它的做法會讓 reset_handler 到 main 之間多一次函式呼叫,變成 reset_handler -> main -> main mangled,
讓 rust 沒辦法像 C 這樣的簡潔,因此我這裡先略過這個實作。
exception handler
在 Rust 上寫 Reset Handler,把 main 分離之後,這篇來處理其他的 handler 的部分,其實大同小異,不知道為什麼作者把這章放第四章了。
來看一下 Cortex M3 的圖,不知道為什麼官網的圖解析度超低, 這張是從其他網站 取得的:
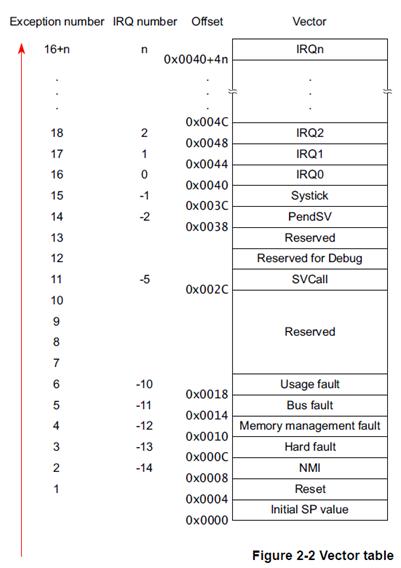
從 Reset 之後一路往上,就是 NMI(non-maskable interrupt)、Hard Fault、Memory Management Fault 等等, 也就是當這些 interrupt 發生時,處理器會終止目前執行的行程,從 reset vector 拿出處理函式的位址並跳過去執行,結束後再回到原本的行程。
我們希望 rt library 提供預設的實作,使用者若提供自己的實作則用使用者寫的:
extern "Rust" {
fn nmi();
fn hard_fault();
fn mem_manage();
fn bus_fault();
fn usage_fault();
fn svcall();
fn pendsv();
fn systick();
}
pub union Vector {
reserved: u32,
handler: unsafe fn(),
}
#[link_section = ".vector_table.exceptions"]
#[no_mangle]
pub static EXCEPTIONS: [Vector; 14] = [
Vector { handler: nmi },
Vector { handler: hard_fault },
Vector { handler: mem_manage },
Vector { handler: bus_fault },
Vector { handler: usage_fault, },
Vector { reserved: 0 },
Vector { reserved: 0 },
Vector { reserved: 0 },
Vector { reserved: 0 },
Vector { handler: svcall },
Vector { reserved: 0 },
Vector { reserved: 0 },
Vector { handler: pendsv },
Vector { handler: systick },
];
#[no_mangle]
pub fn default_exception_handler() {
loop {}
}
先定義好 extern 的函式,並用 union Vector 讓函式與佔位的 u32 共用空間,以實作 reserved 的 interrupt;書裡的 extern 函式是用 C ABI 但目前應該沒差。
exception hander 就是一個長度 14,從 NMI 到 systick 的陣列,分段到區段 .vector_table.exceptions。
最後是預設的 exception handler,會進到無窮迴圈裡面。
linker script
在 linker script ,reset_vector 之後就接著 exception handler,把 .vector_table.exceptions 區段放在這裡。
.vector_table ORIGIN(FLASH) :
{
LONG(ORIGIN(RAM) + LENGTH(RAM));
KEEP(*(.vector_table.reset_vector));
KEEP(*(.vector_table.exceptions));
} > FLASH
另外我們用 PROVIDE 把各 exception handler 指定給 default_exception_handler,只要使用者沒有定義,就會由 linker 來提供符號定義。
PROVIDE(nmi = default_exception_handler);
PROVIDE(hard_fault = default_exception_handler);
PROVIDE(mem_manage = default_exception_handler);
PROVIDE(bus_fault = default_exception_handler);
PROVIDE(usage_fault = default_exception_handler);
PROVIDE(svcall = default_exception_handler);
PROVIDE(pendsv = default_exception_handler);
PROVIDE(systick = default_exception_handler);
測試
因為 QEMU 不能模擬 HardFault 或是 Memory access fault,我們只能切去 nightly version,並用 core::intrinsics 來產生一個 trap。
#![feature(core_intrinsics)]
#![no_main]
#![no_std]
extern crate rt;
use core::intrinsics;
#[no_mangle]
pub fn main() -> u32 { !
intrinsics::abort();
}
結果與除錯
使用 objdump 觀察反組譯的結果,main 會由 intrinsics::abort 發動一個 udf (permanently undefined) 指令,形成一個 hardfault exception。
arm-none-eabi-objdump -d --no-show-raw-insn target/thumbv7m-none-eabi/debug/app
00000040 <main>:
40: udf #254 ; 0xfe
42: udf #254 ; 0xfe
00000044 <reset_handler>:
44: push {r7, lr}
46: mov r7, sp
48: bl 40 <main>
4c: udf #254 ; 0xfe
0000004e <default_exception_handler>:
4e: b.n 50 <default_exception_handler+0x2>
50: b.n 50 <default_exception_handler+0x2>
除錯的話也會看到程式走入 default_exception_handler:
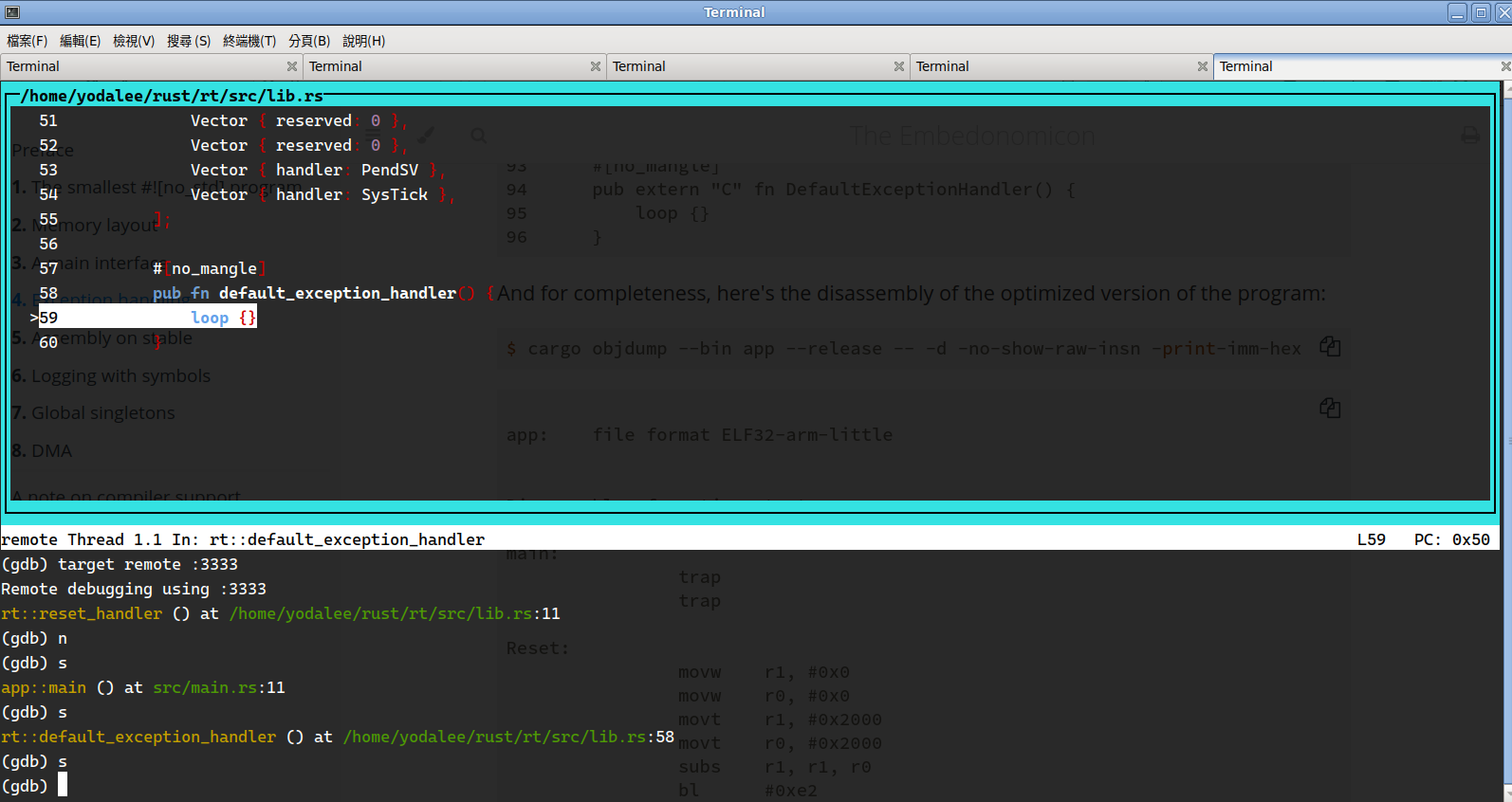
使用 objdump 觀察 .vector_table section 的部分,除了 reset handler 是 0x44 之外,其他都指向 0x4e 的 default_exception_handler;reserved 的部分就留下 0x0 的 reserved word。
arm-none-eabi-objdump -s --section .vector_table target/thumbv7m-none-eabi/debug/app
target/thumbv7m-none-eabi/debug/app: file format elf32-littlearm
Contents of section .vector_table:
0000 00000120 45000000 4f000000 4f000000 ... E...O...O...
0010 4f000000 4f000000 4f000000 00000000 O...O...O.......
0020 00000000 00000000 00000000 4f000000 ............O...
0030 00000000 00000000 4f000000 4f000000 ........O...O...
若使用者自行定義函式 hard_fault,就會看到 Hard Fault 的 exception handler 被設定給使用者定義的 hard_fault 函式了。