故事是這樣子的,大概六月中的時候,小弟因緣際會空出一些時間,因為武肺持續三級警戒只能待在家裡,除了打混摸魚之外順便看了一下別人寫的翻譯文
embedonomicon
,翻完之後看看 rust cortex-m
都被人做走了
,那有什麼東西可以玩的呢?
有一天晚上上床的時候就想到了,剛好最近在想看一下 MIT 教學用的作業系統 xv6,看看究竟可以用的作業系統是怎麼實作的,
而 xv6 本來是針對 x86 處理器,最近才被移植到新的 riscv 處理器上,
也有人把 xv6 用 rust 重新實作
,那我是不是能如下圖,填上這個表格最後一個空格呢?
| C | Rust | |
|---|---|---|
| x86 | xv6 legacy | xv6-rust |
| Riscv | xv6-riscv | 404 Not Found |
於是就我們這篇文啦,其實現在什麼屎都還沒弄出來,只用個不完整的手法 print 出一個 Hello World 而已,感覺自己挖了一個深不見底的坑(後面會看到為什麼),抖…。
總之讓我先做個整理,看看我這段時間都搞了什麼,以及未來的方向。
相關資源整理
xv6-riscv
我用來參考的專案是 MIT 的 xv6-riscv ,已經將 xv6 遷移到 riscv 處理器上;不過這個專案有點沒在維護,在比較新的 qemu 上跑不起來,因此我改用另一個人 fork 的版本
qemu
前述的問題,在 qemu v6 上面,對 riscv 已經實作了 Physical Memory Protection (PMP),
而 MIT 的 xv6-riscv 沒有正確設定 PMP,在跳進 supervisor mode 的時候,存取記憶體就會觸動 PMP 導致處理器介入,
詳情可見這篇修正
。
簡而言之如果要用 MIT 的版本,就要用 qemu v5 進行除錯,我就是因為 archlinux 滾動式更新早早升上 qemu v6 才會踩到這個 bug。
gcc
編譯 xv6-riscv 需要編譯器 riscv64-unknown-elf-gcc,這可以用套件管理進行安裝:
- Ubuntu: gcc-riscv64-unknown-elf
- Archlinux: AUR riscv64-unknown-elf-gcc
在 Ubunut/Archlinux 上,都有所謂的 linux-gnu gcc 可選,不過這裡不能用這個版本,請用 unknown-elf,或者 archlinux 上面還有更短的 riscv64-elf-gcc(其實我懷疑它就是 unknown-elf 只是省略 unknown)。
參考 osdev 的 Target_Triplet
,linux-gnu 假設了編出來的程式是在 Linux 上運作,可以用一些 Linux 提供的服務,我們自幹作業系統的話不會有這些東西。
gdb 就使用同一套的 riscv64-unknown-elf-gdb。
rust
請使用 rustup ,這會讓整個流程方便很多,在這篇文裡可以使用 stable 版本,未來 assembly 出現的時候會需要切到 nightly。
安裝好之後用 rustup 看看提供的 riscv 編譯目標。
$ rustup target list | grep risc
riscv32i-unknown-none-elf
riscv32imac-unknown-none-elf
riscv32imc-unknown-none-elf
riscv64gc-unknown-linux-gnu
riscv64gc-unknown-none-elf (installed)
riscv64imac-unknown-none-elf (installed)
$ rustup target install riscv64imac-unknown-none-elf
我經過許多試驗之後,選定的版本為 riscv64imac-unknown-none-elf,依據 gentoo 的說明 , 意即 lp64,沒有 64gc (lp64d) 另外提供 floating point register,這在後面會遇到一些難解的問題。
至於為什麼不針對 riscv32 開發……這真的是個好問題,我也還不知道要怎麼在程式碼上寫一次可以對應 32/64 的長度差異, 需要大神們出來救一下小弟,我目前都只針對 riscv64 開發。
文件相關
- Riscv spec 文件可從官方網站 或是從 Github 下載,特別是 Volume 2, Privileged Spec,那是開機必看。
- Unprivileged Spec 裡面就是介紹處理器架構:暫存器、指令集 blahblahblah, 除非你是在寫很多 assembly 或是編譯器要查 manual,不然看一下其他 blog 的整理文, 像是這篇關於一些指令 , 跟這篇關於暫存器 應該就夠了。
- five-embeddev 提供的網頁介面 也非常好用。
作業系統的 Hello World
沒想到光整理資源就寫這麼多,總之讓我們開工,我的新 project 取名為 rrxv6,單純就是 rust riscv xv6,目前 code 已經先放上 Github ,但基本上還是個空殼。
這篇大概會做到之前翻譯文的 reset_handler 的程度, 在 ARM 裡面,我們可以用全 rust 的寫法(雖然在 context switch 之類應該免不了要由 assembly 來處理各 register),但在 riscv 就不行了。
這是 ARM 跟 riscv64 架構差異所致,ARM 的設計規範,要把 initial stack top 的位址放在 0x0 ;reset handler 位址放在 0x4,
機器上電的時候就會自己去設定 stack top,然後跳進我們的函式執行,因為 stack 已經設好了所以跳進 rust 函式不會有事,
不然函式去動法喜充滿寫滿亂數的 sp 你看會不會出事。
riscv64 沒這麼自動,進去之後要先自己設定好 sp,這是 rust 函式做不到的。 我們先設定一個專案,做到所謂「作業系統的 Hello World」,也就是一個無窮迴圈。
Rust code:
如先前在 Rust 裸機程式系列 ,先加上一個空殼的 Rust 程式 ,除了 panic_handler 之外就是一個單純無窮迴圈的 start 函式。
// src/main.rs
#![no_std]
#![no_main]
use core::panic::PanicInfo;
#[no_mangle]
fn start() -> ! {
loop{}
}
#[panic_handler]
fn panic(_panic: &PanicInfo<'_>) -> ! {
loop {}
}
Cargo.toml 設定 panic 的時候直接無條件的 abort。
[profile.dev]
panic = "abort"
[profile.release]
panic = "abort"
.cargo/config:
cargo 設定目標為前述的 riscv64imac-unknown-none-elf,在連結的時候使用 linker script linker.ld:
[build]
target = "riscv64imac-unknown-none-elf"
[target.riscv64imac-unknown-none-elf]
rustflags = ["-C", "link-arg=-Tlinker.ld"]
build.rs
為了要和 assembly 一起編譯,我們別無選擇必須使用 build script ,它讓 rust 可以整合其他不同語言的編譯目標,例如 C, assembly 等等。
在 Cargo.toml 裡面加上 cc 的 build-dependencies。
[build-dependencies]
cc = "1.0.25"
build.rs 的內容如下,讓它自動尋找 src/entry.S 來編譯:
use std::{env, error::Error, fs::File, io::Write, path::PathBuf};
use cc::Build;
fn main() -> Result<(), Box<dyn Error>> {
// build directory for this crate
let out_dir = PathBuf::from(env::var_os("OUT_DIR").unwrap());
// extend the library search path
println!("cargo:rustc-link-search={}", out_dir.display());
// put `linker.ld` in the build directory
File::create(out_dir.join("linker.ld"))?.write_all(include_bytes!("linker.ld"))?;
// assemble the assembly file
Build::new().file("src/entry.S").compile("asm");
// rebuild if `entry.s` changed
println!("cargo:rerun-if-changed=src/entry.S");
Ok(())
}
當然,使用 build script 結合 assembly 不是沒有問題,如果上面設定目標設定為 riscv64gc-unknown-none-elf,在編譯的時候會出現如下的錯誤:
note: rust-lld: error:
/home/yodalee/os/rrxv6/target/riscv64gc-unknown-none-elf/debug/build/rrxv6-ceeee899b6717751/out/libasm.a(entry.o):
cannot link object files with different floating-point ABI
目前研判應該是編譯 assembly 的時候在 floating point 上的參數跟 rust 這邊不合,目前沒有解決方法, 所以我目標才選為 riscv64imac-unknown-none-elf。
entry.S
我們的 entry.S 非常簡單,定義一個 _entry,裡面一個 jump 到我們 rust 的 start 函式裡; start 函式只會 loop 所以有沒有設定 sp 都沒差;linker script section 設定為 .text.entry。
.section .text.entry
.global _entry
_entry:
j start
linker.ld
最後來到我們的 linker script,設定 ENTRY 為 assembly 裡面提供的 _entry;riscv 一上電的時候會從 0x8000_0000 的地方取指令來執行
(先聲明我是看各討論區文章及 xv6-riscv 的實作得知這件事,我在規格書裡完全找不到相關描述,有知道出處的拜託一定告訴我QQ)。
因此我們在 SECTIONS 裡先把指針移到 0x8000_0000,依序寫入 *(.text.entry) 及其他的 .text,這個順序不能換,因為 _entry 一定要在 0x8000_0000。
OUTPUT_ARCH("riscv");
ENTRY(_entry);
SECTIONS
{
. = 0x80000000;
.text : {
*(.text.entry);
*(.text .text.*);
}
};
編譯與執行
使用 cargo build 完成編譯,執行使用 qemu-system-riscv64 來執行,參數如下:
- -nographic 關掉圖形介面
- -smp 1 單核心執行,比較好除錯(我至今不知道多核心下如何好好 gdb)
- -machine virt 使用與平台無關的虛擬機
- -bios none 關掉 bios
- -S 讓 cpu 停在剛開始執行的時候
- -gdb tcp:3333 在 port 3333 上接受 gdb 連線,或者可用 -s 等同 -gdb tcp:1234
- -kernel blah 這串加上我們編譯出來的核心
put them together:
qemu-system-riscv64 -nographic -smp 1 -machine virt -bios none \
-S -gdb tcp::3333 -kernel target/riscv64imac-unknown-none-elf/debug/rrxv6
在另一個終端機打開 gdb,並輸入 target remote :3333,在 start 設定中斷點,就可以看到我們 作業系統的 Hello World 已經完成了。
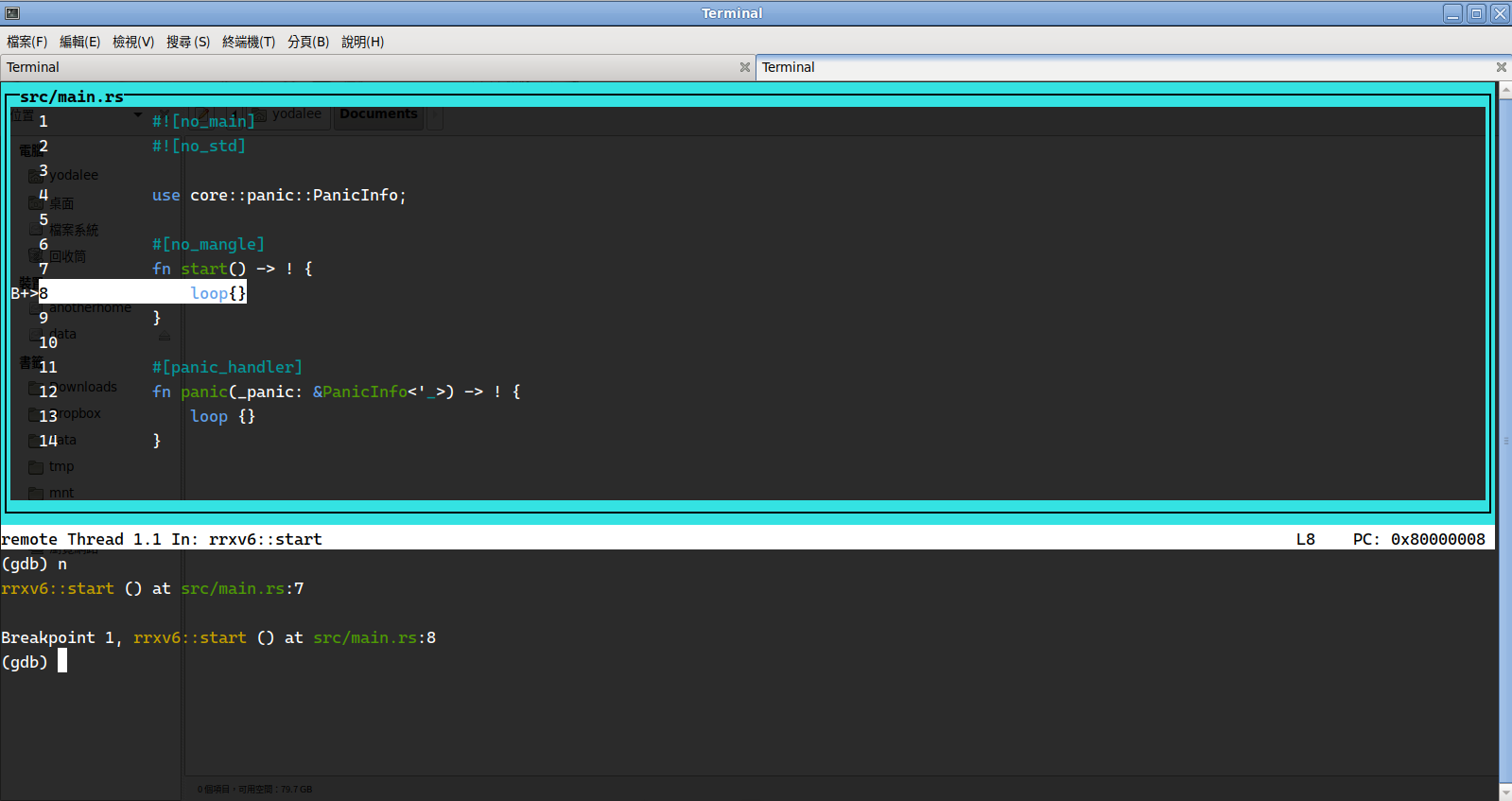
是的,Hello World 代表的是一個最基礎可以動的東西,一般程式是印出 Hello World;Machine Learning 可能是作線性迴歸; 我認為作業系統的 Hello World 就是進到一個無窮迴圈,這是所有作業系統的基礎,而看看這篇文章,這步通常比你想得還複雜。
本來,我是想一口氣直接寫完 riscv 的開機流程的,不過看這篇的份量,我看還是移到下一篇吧。