準備好 C model 和 SystemC 之後,我們的主角 verilator 終於帥氣登場啦。
verilator 會做什麼呢?它的使用流程是這樣子的,它會先分析你寫的 verilog/system verilog 檔案,
然後把它轉成一個 C++ 的標頭檔與實作,裡面的 class 會模擬你寫的 verilog 的行為。
接著你寫另一個 C++ 程式,初始化 verilator 產生出來的 class,餵它 clock 和其他你想要測試的信號,
就能模擬 verilog module 在接收這些信號時的行為,詳細的使用方式,一樣請參考強者我同學 johnjohnlin 的 blog
。
容我使用我們投影片裡面的圖片來介紹這個流程:
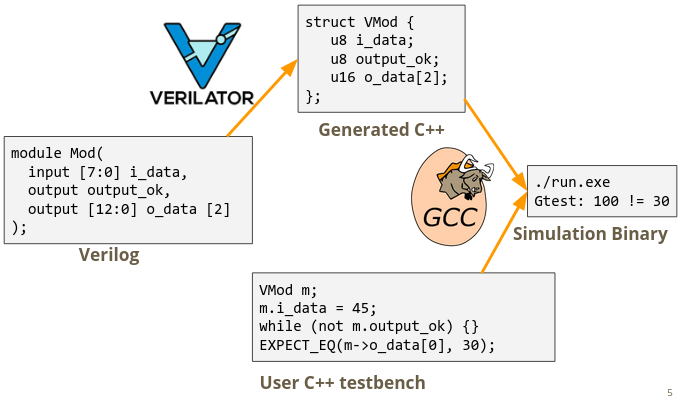
聽起來很美好,但使用 verilator 來驗證會有一些問題:
首先如果我們設計一個 verilog module,又要為它客製化編寫 C++ 程式來餵測資,效率會非常的差。
當然,這個問題用 iverilog 沒有比較好解,因為 iverlog 還是需要 verilog testbench,寫起來沒有比 C++ 簡單。
問題是通常來說,寫 verilog 的工程師不會熟 C++,很難做到自己實作自己測,
但實作的人是最了解的人,交給其他人測都會顯著提高溝通成本和降低測試效率。
因此,我們必須在實作上加上一些規範,透過這層虛擬化簡化 verilog 設計與測試,
讓不熟 C++ 的 verilog 工程師也能輕鬆使用 verilator 才行。
valid/ready handshake protocol
由於 verilog 是硬體底層的描述語言,一般稱呼是:硬體界的組合語言,因此在設計的時候如果不守一些規範, 很容易就寫出無法重用的硬體模組,例如在我還很菜的時候寫的文章 直接就開始教 state machine, 這在實作完之後擴展性上就很容易炸掉。
valid/ready handshake protocol 是硬體設計上廣為使用的規範。 本體是沒有看到標準,但如 Berkeley 大學的講義 , 以及講解最完整的 ARM 的網頁 , 都顯示這個 protocol 的廣泛使用。
大體是這樣子的,在兩個 verilog 模組間要溝通的時候,只需要 valid/ready 兩條線來溝通,
另外還有不限定大小的 data(也可以沒有 data,單純叫下一級起來做事),從前一級 Tx 連結到後一級 Rx。
valid 由 Tx 對 Rx,表示現在介面上的資料是可傳輸的,ready 由 Rx 對 Tx,表示我現在可以接收資料;
只要在 clock 的 positive edge 時,valid/ready 都是 true,就表示傳輸成立,資料會從 Tx 傳輸到 Rx。
整體運作如下圖所示:
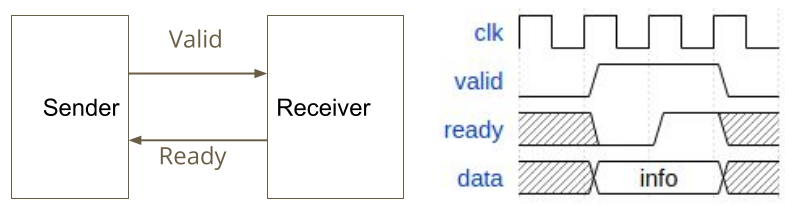
- 第一個 positive edge,valid = 0 即沒有資料要傳輸。
- 第二個 positive edge,valid = 1 但 ready = 0 下一級還沒準備好,不會傳輸。
- 第三個 positive edge,valid, ready = 1,傳輸成立。
在 ARM 的 AMBA 中還有兩條規範:
- Tx 不可以等到 ready 起來了才把 valid 拉起來,這是為了效率考量,要等就會浪費一個 cycle 的時間。
- Tx 一但把 valid 拉起來了,在傳輸成功之前就不能把 valid 再降下去。
至於 Rx 把 ready 拉起來能不能再降下去?
這是一個二選一的問題,要不是對前一級 valid 嚴格就是對後一級 ready 嚴格,我認為是可以的。
有了 valid/ready protocol,我們在 verilog 設計以及 verilator 測試上, 都強制規定模組為一組 valid/ready input 跟一組 valid/ready output;依照過去經驗,這能覆蓋大約 85% 的模組設計。
DUT_wrapper
如 johnjohnlin 在 blog 所述,verilator 支援兩種模式,C++
和 SystemC
;也就是把你的 verilog 轉成 C++ 或是 SystemC。
雖然說用 SystemC 來寫會比較方便,內建的 Clock 還有 Thread 都優於 C++ 版本,但 SystemC 有個重大的缺點:波形會倒出不來,
照著說明實作只會得到一個空的波形檔,原因不明(我心理大概有個底,應該是沒去設定時間造成的)。
沒辦法倒波形對驗證硬體還有除錯上無疑是致命的,因此我們改用 C++,先實作一層 SystemC DUT_wrapper 把 C++ 介面接到 SystemC, 外面就能用 SystemC 的 clk 來驅動,比較方便。
template <typename DUT>
SC_MODULE(DUTWrapper) {
SC_HAS_PROCESS(DUTWrapper);
DUTWrapper(const sc_module_name &name)
: sc_module(name), ctx(new VerilatedContext), dut(new DUT(ctx.get())),
tfp(new VerilatedFstC) {
Init();
SC_THREAD(Executor);
}
~DUTWrapper() { tfp->close(); }
}
DUTWrapper 設計為泛型,可以接受 verilator 產生的任意型別的 DUT,初始化時會準備好倒出 fst 波型檔
;
接著會將 rst_n 降下來重設 DUT。
是的,這裡我們假設 DUT 的時脈稱為 clk,重設叫 rst_n 而且是低態動作,是個多數通用的寫法,未來也許該改成可以設定會比較好。
void Init() {
Verilated::traceEverOn(true);
ctx->traceEverOn(true);
dut->trace(tfp.get(), 99); // Trace 99 levels of hierarchy (or see below)
std::string filename = std::string(dut->modelName()) + "_dump.fst";
tfp->open(filename.c_str());
dut->clk = 0;
dut->rst_n = 1;
dut->eval();
tfp->dump(ctx->time());
ctx->timeInc(1);
dut->rst_n = 0;
dut->eval();
tfp->dump(ctx->time());
ctx->timeInc(1);
dut->rst_n = 1;
dut->eval();
tfp->dump(ctx->time());
}
Connector
稍後再來看 DUT_wrapper 的 Executor,為了向 DUT 寫入跟讀出資料,我們需要實作 Connector,
分別會實作 before_clk 和 after_clk 兩個函式。
目前我們有 InputConnector
和 OutputConnector
兩種子型別,一個負責把東西寫進去,一個負責把東西讀出來,
在 constructor 都會接下 DUT 的 valid/ready reference;可以繼承這個 class,
並提供 write_port/read_port 函式以便從 verilog 編譯成的 class 讀寫東西。
input_connector 和 output_connect 的 before_clk 和 after_clk 分別都經過實測跟重構,
才能在波形檔上看到完美的波形,不會有那種 ready 在經過時脈正緣瞬間就掉下去的狀況。
另外 Connector 也支援 random 模式,以 InputConnector 為例,在不設定 random policy 的狀況下,只要還有資料要寫入,
就一定會把 valid 信號拉起來;或者也可以用 random policy 讓 valid 信號隨機性的拉起,用來模擬實際電路運作時可能出現的狀況。
DUT_wrapper executor
最後我們看看 DUT_wrapper 的 executor:
void Executor() {
while (true) {
wait(this->clk.posedge_event());
for (auto &connector : this->connectors) {
connector->before_clk(dut.get());
}
dut->clk = true;
dut->eval();
bool update = false;
for (auto &connector : this->connectors) {
update |= connector->after_clk(dut.get());
}
if (update) {
dut->eval();
}
if (dump_waveform) {
tfp->dump(ctx->time());
}
ctx->timeInc(period_ps);
// negative edge of clk
dut->clk = false;
Step();
ctx->timeInc(period_ps);
}
}
其實說穿了也沒什麼稀奇:
- 每次 systemc 的 clock 正緣,就先觸發所有 connector 的 before_clk。
- 設定時脈轉正並呼叫 verilator eval。
- 呼叫 connector after_clk 檢查過了正緣有沒有需要修正的 valid/ready,由於 after_clk 不一定每次都會觸發,可以用回傳值跳過一次 eval。
- 倒波形,並步進 verilator 時間。
- 設定時脈負緣,模擬和倒波形。
scoreboard
測試會把資料餵進我們的 DUT 裡面,出來的資料跟標準答案比較,這裡我們再實作一個 scoreboard 的 module,
內部分別有兩個 queue 接收來自 DUT 結果和標準答案。
一但兩個 queue 都不是空的,都會對最新的答案用 memcmp 進行比較。
據 johnjohnlin 的說法,一般來說看到錯誤的測資就可以切掉了不用讓它跑完,這裡我們是塞一下 RaiseFailure 的 callback 給它,
如果使用者想切掉就切掉,不想切掉送 empty function 進來就好了。
void check() {
while (goldens.size() != 0 && receiveds.size() != 0) {
const DataType &received = receiveds.front();
const DataType &golden = goldens.front();
if (memcmp(&golden, &received, sizeof(DataType)) == 0) {
} else {
LOG(ERROR) << "Golden != Verilog Out: " << golden << " vs " << received;
pass = false;
RaiseFailure();
}
goldens.pop_front();
receiveds.pop_front();
}
}
testbench
最後我們有個 SystemC module testbench ,把上述的模組都整在一起。
template <typename In, typename Out, typename DUT>
SC_MODULE(TestBench) {
DUTWrapper<DUT> dut_wrapper;
unique_ptr<ScoreBoard<Out>> score_board;
sc_clock clk;
TestBench(const sc_module_name &name, bool dump_waveform = false)
: sc_module(name), dut_wrapper("dut_wrapper", dump_waveform),
score_board(new ScoreBoard<Out>(KillSimulation)),
clk("clk", 1.0, SC_NS) {
dut_wrapper.clk(clk);
}
}
testbench 宣告了 systemC clk 來驅動 DUT_wrapper;初始化好 ScoreBoard 準備比較資料。
testbench 的 run 函式負責開始 systemc 模擬,並在結束後檢查 score_board 跟 dut_wrapper 是否 pass。
int run(int duration, sc_time_unit unit) {
sc_start(duration, unit);
bool is_pass = true;
if (!score_board->is_pass()) {
LOG(ERROR) << "Score board result mismatch" << endl;
is_pass = false;
}
if (!dut_wrapper.is_pass()) {
LOG(ERROR) << "DUT Wrapper final check not passed" << endl;
is_pass = false;
}
return !is_pass;
}
寫 Testbench
對使用者來說,現在寫 verilog 的測試變得簡單許多,大概分為:
- 繼承 InputConnector 跟 OutputConnector,針對 verilog module 提供 write_port 跟 read_port 函式,由於我們有 pack 跟 unpack 函式,未來有機會連這步也不用做
- 宣告 Testbench,並對 DUT wrapper 註冊這兩個模組
- 對 Testbench 依序注入想要測試的 input 與 golden data
- 呼叫 Testbench 的 run 函式,測試就完成了。
例如我們測試計算 2^256 mod N 是否正確的程式碼:
int sc_main(int, char **) {
unique_ptr<TestBench_TwoPower> testbench(
new TestBench_TwoPower("TestBench_two_power_mod_sv", /*dump=*/true));
auto driver =
make_shared<Driver>(testbench->dut_wrapper.dut->i_valid,
testbench->dut_wrapper.dut->i_ready, nullptr);
auto monitor = make_shared<Monitor>(
testbench->dut_wrapper.dut->o_valid, testbench->dut_wrapper.dut->o_ready,
[&](const OUT &out) { return testbench->notify(out); }, KillSimulation,
nullptr);
testbench->register_connector(
static_cast<shared_ptr<Connector<DUT>>>(driver));
testbench->register_connector(
static_cast<shared_ptr<Connector<DUT>>>(monitor));
KeyType modulus(
"E07122F2A4A9E81141ADE518A2CD7574DCB67060B005E24665EF532E0CCA73E1");
driver->push_back({.power = TwoPowerIn::IntType(512), .modulus = modulus});
driver->push_back({.power = TwoPowerIn::IntType(256), .modulus = modulus});
TestBench_TwoPower::OutType golden
from_hex(
golden,
"0AF39E1F831CB4FCD92B17F61F473735C687593A931C97D2B60AD6C7443F09FDB");
testbench->push_golden(golden);
from_hex(
golden,
"0x1F8EDD0D5B5617EEBE521AE75D328A8B23498F9F4FFA1DB99A10ACD1F3358C1F");
testbench->push_golden(golden);
return testbench->run(1, SC_US);
要新增更多資料只要從 driver 跟 testbench 送即可。
當然這個框架還有很多進步的空間,例如:
- 怎麼樣一次灌大筆的資料進去?
- 如果不是一進一出的模組,該怎麼測試?
- 怎麼樣跟 cmake 的 ctest 整合等等?
在 COSCUP 之後我們也有努力在改進,但總之,有了這些工具就能專注在寫 verilog 了,
下一章就來進到實作
垃圾語言verilog 的部分吧。