上一篇我們看了 Design Compiler 的使用,把我們的電路合成為邏輯閘,下一步看是先送 LEC 或是做 post-synthesis simulation,再來就要進到重頭戲用 APR 來畫 Layout 了, 在 APR 之前,我們先用單獨一篇文來看看 APR 前要準備的東西。
要注意這裡說明的對象是 Cadence 的 INNOVUS,有些內容跟 Synopsys ICC2 很可能不一樣,如果是 ICC2 使用者請小心參考。
你的設計
一般我會叫 chip_top.syn.v,也就是從 design compiler 吐出來的 verilog file ,常理來說不用經過太多處理可以直接使用,只要注意下面幾點即可:
- 如果你的設計要打 pad,建議在送合成前就先加入 IO cell,如 Desicn Constraint 篇
所說,這樣合成時序才會對。
輸出的 .syn.v 匯入 layout 軟體時,這些 io pad 會和下面 .io 檔案設定的 cell 連結在一起。 - 之前上課的時候講師會提醒 .syn.v 裡不應該有 assign 語法,其一是在 design compiler tcl 內加入:
set_fix_multiple_port_nets -all -buffer_constants [get_designs *]
就能消除掉 assign 語法;其二是我之前也曾把有 assign 的 verilog file 丟進 INNOVUS 也沒出事 (而且晶片有量到),我判斷這個現在已經不是問題。
design constraint .sdc 檔
上一回 design compiler tcl 設定中 write_sdc 寫出的檔案,在匯入 layout 軟體前,
先把下面幾個設定槓掉:
- set_wire_load_model
- set_dont_touch_network
- set_fix_hold
- set_ideal_network
wire load model 是因為 APR 軟體可以知道真正的線寬並選用對應的負載模型; dont_touch_network, fix_hold, ideal_network 都是用在 clk, reset 訊號上,Design Compiler 沒有實體繞線,不會知道 clock tree 的分佈方式,因此透過這些設定讓它別動這些訊號線, 別浪費時間處理這些高負載的線路,而 APR 軟體一定要去處理這些線路,如果在 .sdc 檔中指定不要碰,APR 會在跑 clock tree 時回報無法達到 constraint 讓你做不下去。
IO 設定 chip_top.io
雖然我們做著技術前沿的工作,但有些東西還是古早的工具最有效。
每一次下線我都會準備一張如下的 A4 紙,最上面的方框代表我的晶片(外框畫起來很像 Mac 的 Command 符號),
並用鉛筆在四周開始安排每個接腳,方便隨時塗改抽換。
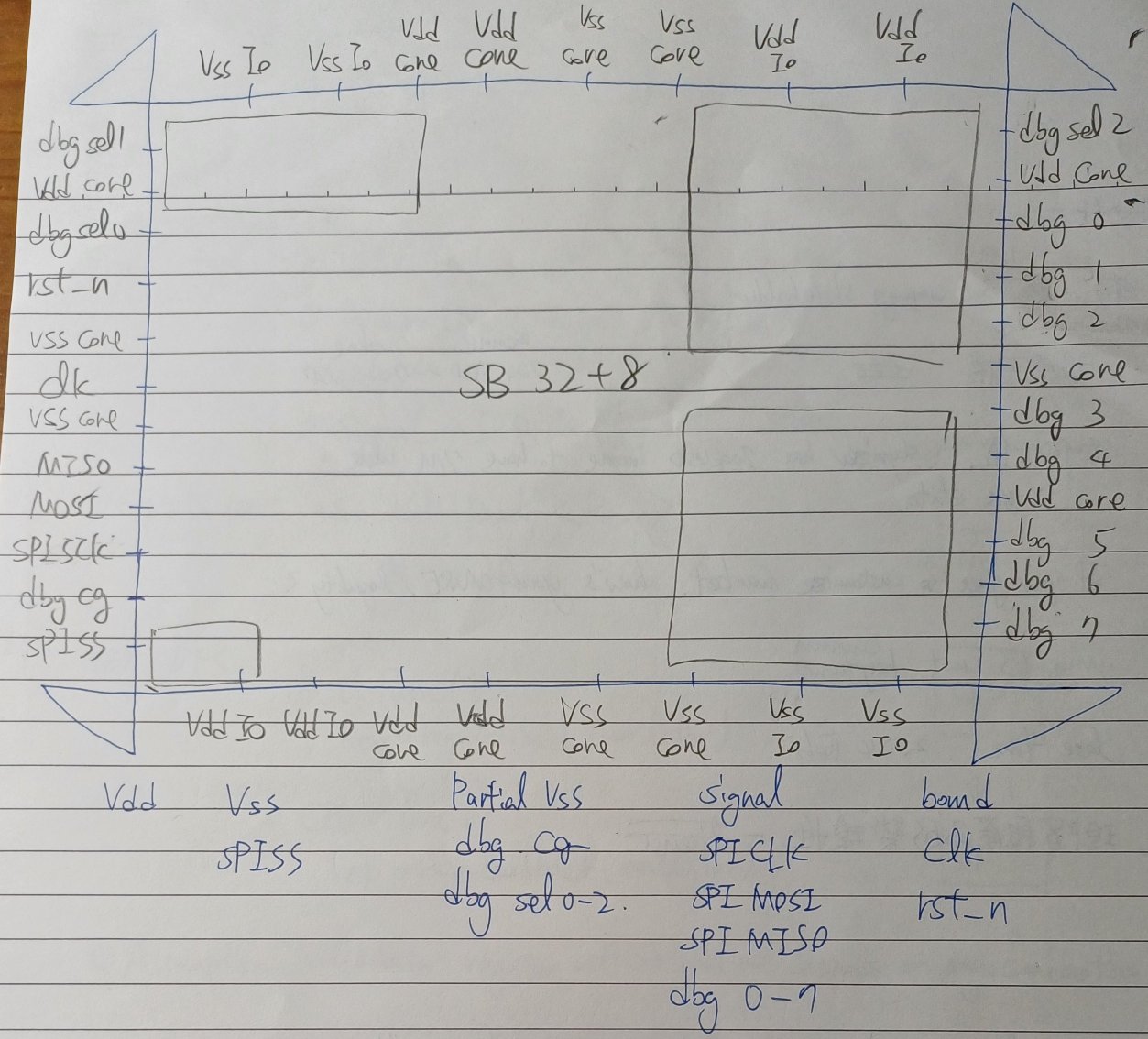
接腳圖之外,再打開 APR 軟體,看到實際電路尺寸後,可以在方格中可以畫上 macro 的資訊, 例如我這個設計用了四顆 memory,其中兩顆大顆的跟兩顆小顆的,就把大致的位置畫上去(一樣請愛用鉛筆), 建議尺寸 – 特別是跟各接腳的相對位置要畫對,因為電源的 pad 會拉 金屬到周圍的 Power Ring 上 ,而 hard macro 周圍 也要加上自己的 Macro Ring 供電,兩者就會相衝,在紙上做好記錄在安排 pad 的時候可以先迴避這點, 後續 Layout 流程可以省掉很多的問題。
上半部的接腳圖之外,下半部我們會寫上其他的資訊,這部分等到正式講 Layout 時再來說。
安排 IO 的時候,除了各式訊號線之外,還要安排 Core 使用的電源,和 IO 接腳使用的電源, 第一次遇到鐵定是有點疑惑該怎麼規劃,大致可以參考的規則如下所述:
Core 電源
晶片要運作就要吃電,基本來說頻率愈高就要吃更多電,如果電給的不夠頻率就會上不去, 但我們要怎麼知道設計的晶片會吃多少電?
在設計各階段,都有各種工具給的功耗的預估:
- Design Compiler 合成完之後,使用 report_power 得到功耗預估。
- APR 的時候,INNOVUS 內建功耗工具,會再給出一個功耗預估。
- 業界的功耗預估標準是用 Synopsys 的 PrimeTime,搭配模擬時的真實行為, 在大廠工作的同學說可以估到非常準,但我自己是還沒試用過。
注意這些功耗全部都不是真實的功耗,例如 Design Compiler 缺乏 clock tree、實際運作行為等資訊,所以預估只能當作參考。
以下就列出我過去下線時,Design Compiler、INNOVUS 與實際量測的結果,給大家做個參考:
| Design Compiler (mW) | INNOVUS (mW) | Measurement (mW) |
|---|---|---|
| 114 | 220 | 77 |
| 18 | 32 | 10 |
| 58 | 81 | 31 |
可以看到無論是 Design Compiler 亦或 INNOVUS 都會高估,INNOVUS 更是估到 2-3 倍的功耗;
不過功耗這種東西不嫌多,多加兩個 pad ,總好過晶片出來發現功耗吃滿跑不到 spec 畢不了業只能降頻來跑。
因為在進行 APR 之前就要先安排 pad,我一般會用 Design Compiler 預估的功率,抓 1.5-2 倍的餘裕,
相信就算 APR 估更高也能吃得下。
接著在 Pad 的文件裡,能找到 VDD/VSS Pad 所能承受的電流或是功率,用這樣去算所需的 VDD/VSS 對數。
IO 電源
再來是 IO 電源,IO 電源的消耗來自於訊號 pad 工作時會需要耗電,如果 VDD/VSS 不夠,就會導致 VDD/VSS 抖動(例如從 1V 抖到 0.99V)。
如果晶片上有大量訊號同時上下開關,而 IO VDD/VSS 不夠以致壓不住,就會像在小巨蛋開唱
We will rock you
一樣,抖動大到引發問題,例如影響到 clock 的穩定性,
或者把 active low 的 reset 訊號抖下去,晶片就重設了。
IC 設計業有一個 DF 值來描述這個問題,如果你做的晶片沒使用 Serial Interface
,而是把大量訊號拉出來,上 V93000
這種自動量測平台去量測,就需要好好算一下 DF 值並預估需要的 VDD/VSS 數。
在我學會之前就請先參考皓宇的筆記
。
如果有使用 Serial Interface,則不太可能會有大量訊號同時跳動,IO VDD/VSS 放個 1-2 對就絕對夠用了。
職場前輩給的建議是:
接腳中 ⅓ 是訊號線;⅓ 是 Core 電源;⅓ 是 IO 電源。
我自己是覺得這個估計電源抓得比較誇張一點,確保電源絕對夠用,信號完整度絕不崩盤。
其他建議
最後還有一些為了訊號完整性建議的規則,簡列如下:
- Clock pad 的兩邊,用 VSS 夾住,確保不會有其他訊號跑進來干擾 clock
- 視封裝把 Clock 安排在路徑最短的邊上,減上 clock 的抖動與干擾
- 平均分配 Core VDD/VSS 的位置,不要集中在某邊,離電源太遠的那邊就會缺乏供電。
- IO Ring 也是,在有大量輸出的部分插入一些 IO VDD/VSS,以免抖動影響量測
你仔細看就會看到我上面那張圖根本是亂畫的
IO 設定
安排好接線之後就來改寫 io 檔案,一個完整的 io 設定如下所示,設定的方向是依照座標軸的, 上排和下排是依 X 軸方向,由左到右;左排跟右排則是依照 Y 軸方向,由下到上:
(globals
version = 3
io_order = default
)
(iopad
(top
(inst name="IVSS_T0" cell="VSS_io" place_status=placed)
(inst name="IVSS_T1" cell="VSS_io" place_status=placed)
(inst name="CVDD_T2" cell="VDD_core" place_status=placed)
(inst name="CVDD_T3" cell="VDD_core" place_status=placed)
(inst name="CVSS_T4" cell="VSS_core" place_status=placed)
(inst name="CVSS_T5" cell="VSS_core" place_status=placed)
(inst name="IVDD_T6" cell="VDD_io" place_status=placed)
(inst name="IVDD_T7" cell="VDD_io" place_status=placed)
)
(left
(inst name="ipad_ss" place_status=placed)
(inst name="ipad_dbg_clk_gate" place_status=placed)
(inst name="ipad_sck" place_status=placed)
(inst name="ipad_mosi" place_status=placed)
(inst name="opad_miso" place_status=placed)
(inst name="CVSS_L0" cell="VSS_core" place_status=placed)
(inst name="ipad_clk" place_status=placed)
(inst name="CVSS_L1" cell="VSS_core" place_status=placed)
(inst name="ipad_rstn" place_status=placed)
(inst name="ipad_dbg_sel0" place_status=placed)
(inst name="CVDD_L2" cell="VDD_core" place_status=placed)
(inst name="ipad_dbg_sel1" place_status=placed)
)
(bottom
(inst name="IVDD_B0" cell="VDD_io" place_status=placed)
(inst name="IVDD_B1" cell="VDD_io" place_status=placed)
(inst name="CVDD_B2" cell="VDD_core" place_status=placed)
(inst name="CVDD_B3" cell="VDD_core" place_status=placed)
(inst name="CVSS_B4" cell="VSS_core" place_status=placed)
(inst name="CVSS_B5" cell="VSS_core" place_status=placed)
(inst name="IVSS_B6" cell="VSS_io" place_status=placed)
(inst name="IVSS_B7" cell="VSS_io" place_status=placed)
)
(right
(inst name="opad_dbg_data7" place_status=placed)
(inst name="opad_dbg_data6" place_status=placed)
(inst name="opad_dbg_data5" place_status=placed)
(inst name="CVDD_R0" cell="VDD_core" place_status=placed)
(inst name="opad_dbg_data4" place_status=placed)
(inst name="opad_dbg_data3" place_status=placed)
(inst name="CVSS_R1" cell="VSS_core" place_status=placed)
(inst name="opad_dbg_data2" place_status=placed)
(inst name="opad_dbg_data1" place_status=placed)
(inst name="opad_dbg_data0" place_status=placed)
(inst name="CVDD_R2" cell="VDD_core" place_status=placed)
(inst name="ipad_dbg_sel2" place_status=placed)
)
(topleft
(inst name="CORNER_TL" cell="CORNER" place_status=placed)
)
(topright
(inst name="CORNER_TR" cell="CORNER" place_status=placed)
)
(bottomleft
(inst name="CORNER_BL" cell="CORNER" place_status=placed)
)
(bottomright
(inst name="CORNER_BR" cell="CORNER" place_status=placed)
)
)
我歸納出來,針對電源的命名原則如下:
- 首字母 I, C 代表 IO 跟 Core
- VDD/VSS 代表電源和接地,要用 VDD/GND 也可以
- 後綴使用 T,B,L,R 代表上排、下排、左排、右排,再加上流水號,不建議用全域流水號像 VDD1, VDD2…, 這樣會變成你要追蹤 1, 2, 3 … 分別出現在四個方向的哪裡,會很麻煩。
除了電源之外,訊號線不用設定 Input/Output cell,INNOVUS 可以自動從 .v 檔內的 cell 推論出該 pad 使用的元件。
PDK
準備製程廠提供的 PDK 檔,跟每一家不同的製程廠有關,參考前請再三確認,套用你製程的設定而不是照抄。
至少應該會有 tech.lef, core.lef 和 io.lef 三類檔案,core 還會依製程分成 slow/fast 等變體,全部都要用到;在 layout 之前,需要將製程模型轉為 INNOVUS 使用的 OASIS library,以下是匯入用的 script
lef2oa -lef tech.lef -lib macroLib -techRef N90 -useFoundryInnovus
lef2oa -lef core_fast.lef -lib macroLib
lef2oa -lef core_slow.lef -lib macroLib
lef2oa -lef io.lef -lib macroLib
晶圓廠提供的檔案會是 LEF 格式,內含標準元件庫的各式抽像的物理資訊,
Team VLSI
可以看到相關的範例。
tech.lef 是定義該製程基礎參數的 Technology LEF 檔,像是
- 尺寸單位
- 有多少金屬層與多少 Via
- 每層金屬的名字、類型
- 金屬是水平或垂直
- 最小/最大寬度
- 金屬間的建議間隔
包山包海,這些資訊讓 APR 軟體在 layout 的時候,有個基本的規則可以依循。
core_fast/slow.lef 是 Cell LEF,裡面會是所有可用的元件,資訊如:
- 名字
- 元件類型
- 座標、尺寸
- 接點名字、輸出入、性質 (signal, power, clock…)、接點形狀、使用金屬層
如果用 阿嬤都能懂的晶片設計 來比喻, LEF 就是提供一個高層次的建築描述,像是這棟房子是用鋼筋混凝土建的,有四層樓可以蓋,然後跟 IKEA 拿到家俱型錄,桌子的尺寸有這些選擇,浴缸的尺寸有這些,要固定的話哪裡可以鎖螺絲,要用幾號螺絲…, APR 軟體會利用這些資訊完成 Layout。
Hard Macro
與 PDK 類似,在 layout 前也要將 Hard Macro (因為是數位電路,這裡指的是記憶體) 所用 .lef
和 .v 檔匯入。
我所用的記憶體都是從產生器產生的,包含。
- hardmacro.lef
- hardmacro.v
- hardmacro.gds
轉換的 script 包含 lef2oa 和 verilogAnnotate 兩個 script,前者提供 layout,後者提供 verilog 的參照。
lef2oa -lef hardmacro.lef -lib macroLib
verilogAnnotate -refLibs macroLib -verilog hardmacro.head.v
一般來說 memory compiler 輸出的 verilog 包含行為的模型,verilogAnnotate 只需要 port 跟 port 寬度即可,hardmacro.head.v 請如下方把所有行為相關的 code 都砍掉。
module hardmacro (clk, cen, wen, addr, i_data, o_data)
input clk;
input cen;
input wen;
input [15:0] addr;
input [31:0] i_data;
output [31:0] o_data;
endmodule
mmmc 檔
MMMC
的全名是 multi-mode multi-corner 的簡稱,也有人反過來簡稱為 MCMM。
MMMC 的來由是這樣的,隨著製程進步與晶片的複雜化,要整體考慮的模式也愈來愈多,例如
本來的晶片也許只要時序過了就行了,但製程微縮後兩條線中間信號的耦合也要考慮,做很小之後散熱也變成問題,
所以功耗密度也要考慮;為了測試我們加個 scan chain,那多出來的 scan timing 也要分析。
問題是時序、功耗、耦合本來是多個不同工具負責的,如果先來修時序,修完可能最佳化太多,變成功耗過不了;
這種跨模式違反規則變得異常麻煩,會耗費大量的 ECO 時間反覆進行修正。
到了高階的設計,模式和需要分析的邊角案例會成倍增加
(例如我在時序最快、功耗最高的狀況下,RC 的耦合是否符合規則),組合起來的數量可能達到數百個。
要怎麼辦呢?於是 MMMC 出現了。
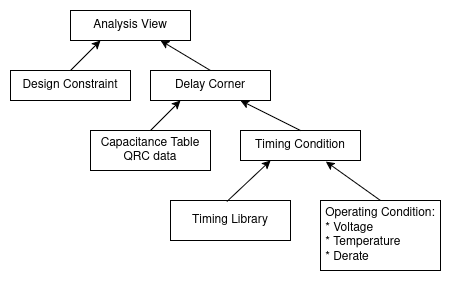
MMMC 大致依照下圖的階層圖進行組合,每個組合都會得到一個邊角的條件讓軟體進行分析。
APR 軟體會就所有條件進行分析,確保都符合規範,省去手動迭代不同種類測試的功夫。
一個範例用的 MMMC 設定如下,同樣這裡請參考使用製程的檔案,複製時請謹慎:
create_rc_corner -name RC_worst
-cap_table {rcworst.captble}
-qrc_tech {rcworst.tch}
create_rc_corner -name RC_best
-cap_table {rcbest.captble}
-qrc_tech {rcbest.tch}
create_library_set -name lib_max -timing
{ slow.lib io_slow.lib hardmacro_slow.lib }
create_library_set -name lib_min -timing
{ fast.lib io_fast.lib hardmacro_fast.lib }
create_opcond -name 0p9v_125c -process 1 -voltage 0.9 -temperature 125
create_opcond -name 1p1v_m40c -process 1 -voltage 1.1 -temperature -40
create_timing_condition -name TC_max -library_set {lib_max} -opcond 0p9v_125c
create_timing_condition -name TC_min -library_set {lib_min} -opcond 1p1v_m40c
create_delay_corner -name DC_max -timing_condition {TC_max} -rc_corner {RC_worst}
create_delay_corner -name DC_min -timing_condition {TC_min} -rc_corner {RC_best}
create_constraint_mode -name CM_func -sdc_files { func.sdc }
create_constraint_mode -name CM_scan -sdc_files { scan.sdc }
create_analysis_view -name AV_func_max
-constraint_mode {CM_func} -delay_corner {DC_max}
create_analysis_view -name AV_func_min
-constraint_mode {CM_func} -delay_corner {DC_min}
create_analysis_view -name AV_scan_max
-constraint_mode {CM_scan} -delay_corner {DC_max}
create_analysis_view -name AV_scan_min
-constraint_mode {CM_scan} -delay_corner {DC_min}
set_analysis_view
-setup {AV_func_max AV_scan_max}
-hold {AV_func_max AV_func_min AV_scan_min}
可以看到,其實不過是把我上面畫的階層圖改成用文字描述罷了。
- create_rc_corner:使用 capTable PDK 的 RC 模型與 qrctechfile 給 RC 萃取軟體使用的檔案, 建立一個 RC 案例。
注意在 create_rc_corner 的時候,大括號裡面不要加上空白,例如
-cap_table { rcworst.captble } -qrc_tech { rcworst.tch }
很莫名的,INNOVUS 會在這瞬間把前後有空白的 " rcworst.captable " 當成檔名,很自然也找不到對應的檔案。
- create_library_set:打包所有相關的 library,注意有使用的 hardmacro 也要包進來一起分析。
- create_opcond: 設定運作溫度、電壓,常見就是溫度 -40~125℃,電壓 -10%~+10%; 高階製程可能會多出其他的溫度條件,例如在高溫時電晶體反而跑更快了,會需要多一個 operating conditon。
- create_timing_condition:組合 operating condition 和 library。
- create_delay_corner:組合 timing condition 和對應的 RC 案例。
- create_constraint_mode:匯入需要達成的 constraint
- create_analysis_view:針對各 constraint 創建各種 analysis view。 最後用 set_analysis_view 把各 analysis view 分類到 setup 條件或 hold 條件,就完成啦。
結語
雖然只是幾個檔案,但加上說明還真不少,相信大家也看到頭昏腦脹了。
正常情況來說,文中大部分的設定,例如 MMMC,.sdc 等,都應該會有舊有的檔案可以參考,
常年在下線的公司,其設定都應該會有一年年的留存,照著往年的設定些微修改即可,工具理應都自動化了,
也沒多少調整的空間;除非你有幸參與到換製程的大年份,那就恭禧了,這可是難得的經驗呢。