故事是這樣子的,一般來說 IP 的工作流程,我們會透過 AXI Lite 寫入 register 叫 IP 開始工作,那我們要怎麼知道 IP 工作已經完成了?
最簡單的方法就是把 IP 狀態映射到一個 register 上,驅動就不斷的去騷擾讀那個
register,這在實作上叫做 busy polling,簡單粗暴,缺點是驅動就卡死在這裡不能做其他事。
另一種則是 IP 在完成工作的時候打一個 interrupt 出來,處理器接收到這個 interrupt
就能回頭叫驅動去處理 IP 的收尾工作。
這篇文我們就來看看怎麼做這件事。
實驗用的 IP
實驗用的 IP 是這樣的,輸入一個 32 bits 的 threshold,啟動之後計算
threshold cycles 之後,會發出 done signal。
一樣使用 AI 幫助實作:
Implement an Interrupter module.
Input start and 32 bits threshold.
Output done and 32 bits id.
Upon start, run threshold cycles, assert and hold the done signal.
Increment id every time a done happens.
module interrupter (
input logic clk,
input logic rst_n,
input logic start,
input logic [31:0] threshold,
output logic done,
output logic [31:0] id
);
logic [31:0] counter;
logic running;
always_ff @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
counter <= 32'd0;
running <= 1'b0;
done <= 1'b0;
id <= 32'd0;
end else begin
// Start condition
if (!running) begin
running <= 1'b1;
counter <= 32'd0;
end
else begin
if (counter == threshold - 1) begin
running <= 1'b0;
done <= 1'b1;
id <= id + 1;
end else begin
counter <= counter + 1;
end
end
end
end
endmodule
其實 id 沒什麼必要,刪掉也行。
連接 block diagram
打包 IP 基本上就參考之前的 AXILite ,接兩個 input register 0, 1 給 start 跟 threshold; output registers 2, 3 給 done, id。
Interrupt 的設定參考下面這篇 Interrupt 官方文章 需要的模組是 AXI Interrupt Control,雙擊點開的設定如下:
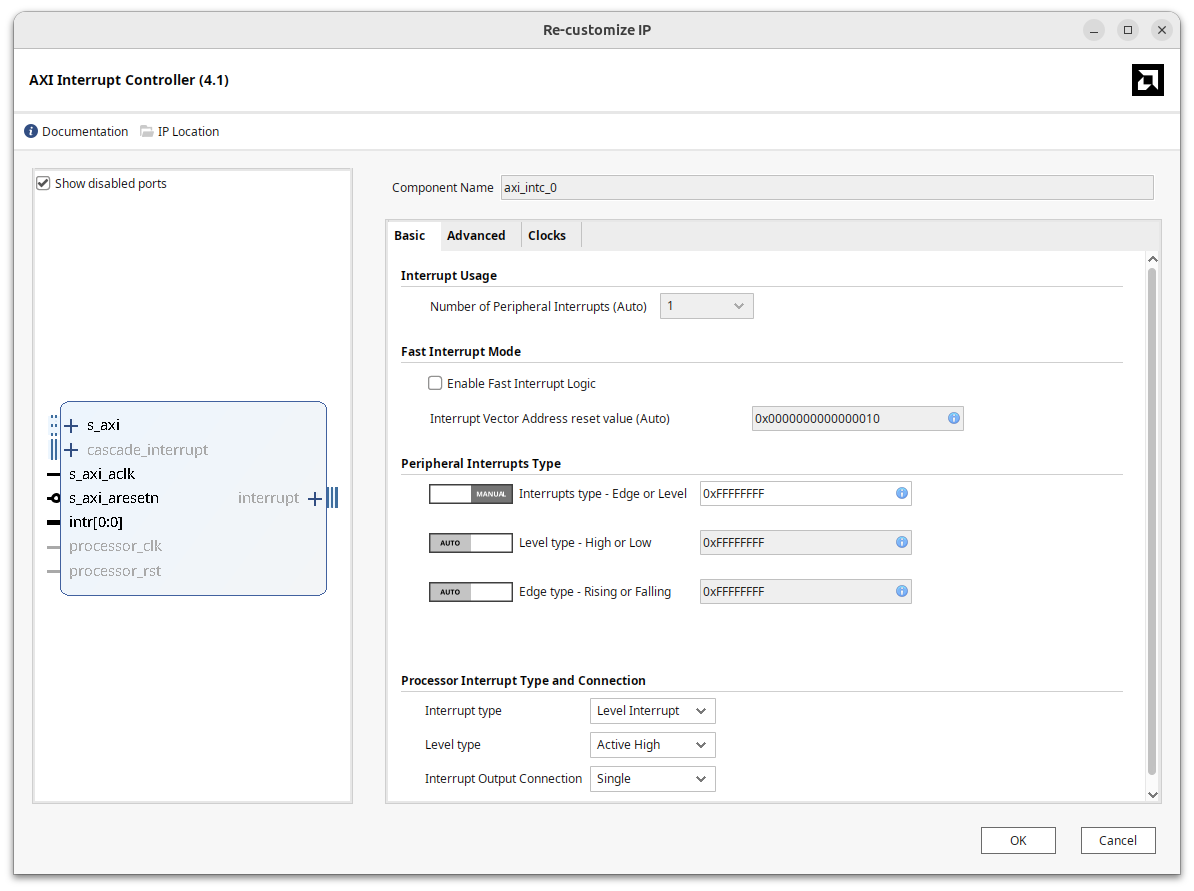
- 我們的 interrupt 模式是 level,我設定是設 manual 並打入 0xFFFFFFFFF
- Processor Interrupt Type 選擇 Level Interrupt
- Processor Interrupt Output connection 選擇 Single
跟上一篇一樣再吐槽一次,Xilinx 你們的 UI 是出了什麼問題?
這個 auto/manual toggle 是什麼鬼啦,到底 Auto 是 edge interrupt
還是 level interrupt?
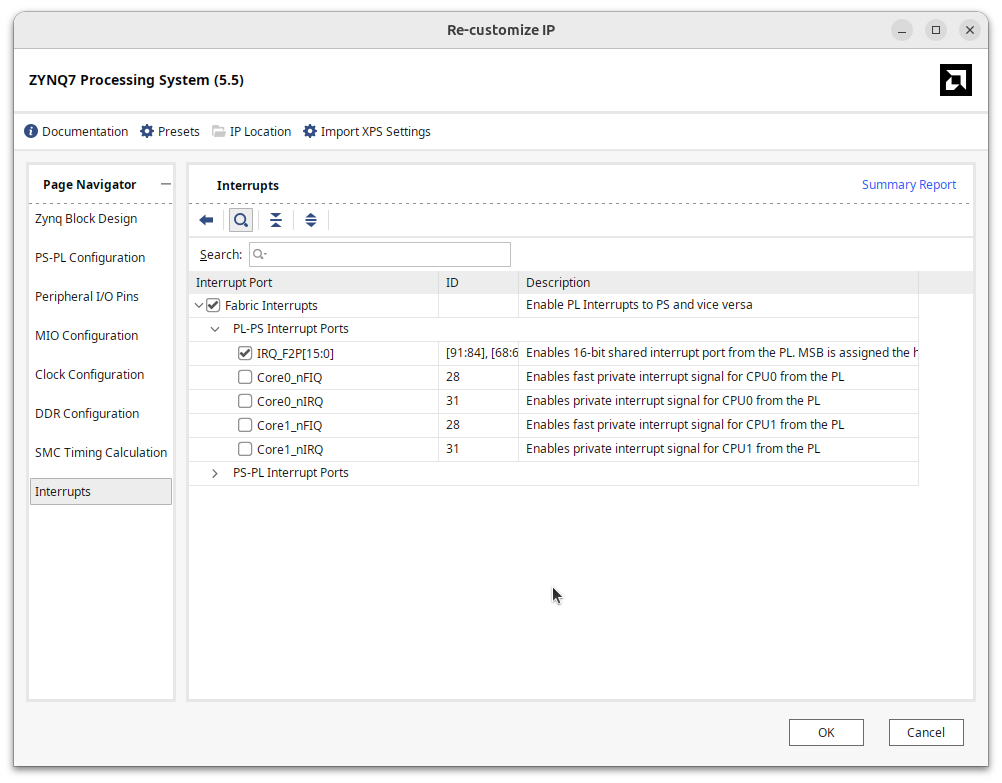
雙擊點開 Zynq 處理器的設定,在 Interrupt 的設定中,啟動 PL-PS Interrupt 的 F2P shared interrupt。
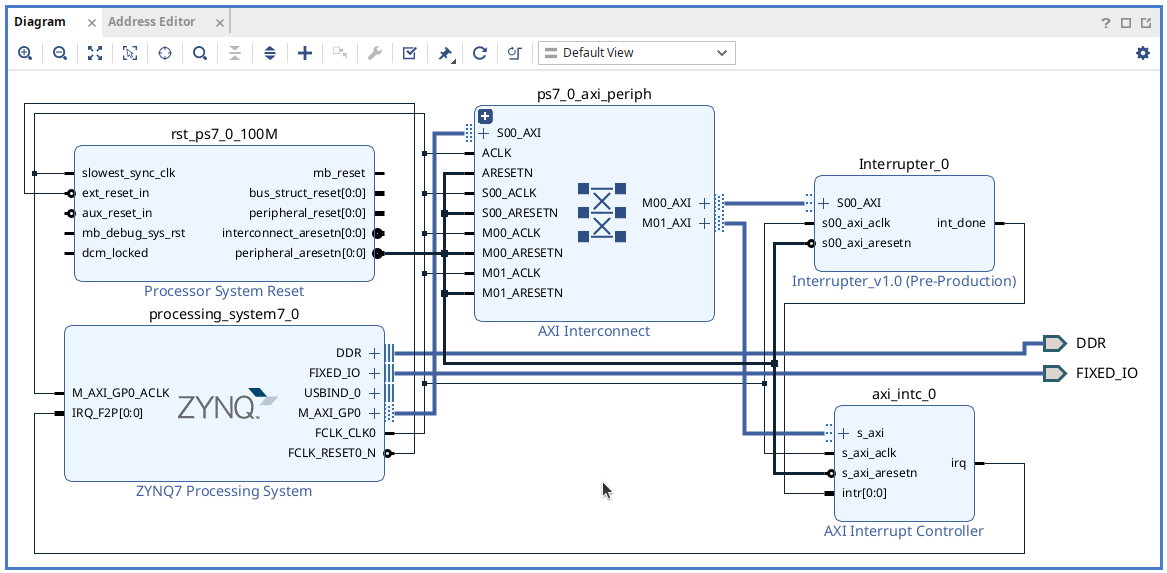
開始連線,把 IP 的 done 連接到 Interrupt Control 的 Intr[0:0]
Interrupt Control 的 irq 連進 zynq 處理器的 IRQ_F2P 埠
完成的 block diagram 如下圖:
測試結果
以下是測試用的 python code,ol? 會在 IP 中看到 _interrupts 的物件。
from pynq import Overlay
import timeit
import time
ol = Overlay("interrupt.bit")
ol?
i_int = ol.Interrupter_0
print(i_int._interrupts)
_interrupts 的內容
{'int_done': {
'controller': 'axi_intc_0',
'index': 0,
'fullpath': 'Interrupter_0/int_done'}
}
測試一:使用 Polling
ids = []
def by_polling():
i_int.write(0, 1)
while(True):
done = i_int.read(0)
if done != 0:
break
ids.append(i_int.read(4))
for threshold in [1, 10, 100, 1000, 10000, 100000, 1000000]:
i_int.write(4, threshold)
exectime = timeit.timeit(by_polling, number=100)
print(exectime, exectime/100*1e6)
測試結果:
| threshold | total time (s) | average time (μs) |
|---|---|---|
| 1e0 | 0.00663 | 66.3 |
| 1e1 | 0.00655 | 65.5 |
| 1e2 | 0.00701 | 70.1 |
| 1e3 | 0.00813 | 81.3 |
| 1e4 | 0.01690 | 169.0 |
| 1e5 | 0.10566 | 1056.6 |
| 1e5 | 1.00625 | 10062.5 |
測試二:使用 Interrupt
由於 Interrupt 會使用 python 的 await 來實作,一時半刻沒辦法用 timeit 測量,就先改用比較直接的 time 來測試。
for threshold in [1, 10, 100, 1000, 10000, 100000, 1000000]:
i_int.write(4, threshold)
ids = []
start = time.time()
for _ in range(100):
i_int.write(0, 1)
await i_int.int_done.wait()
ids.append(i_int.read(4))
end = time.time()
exectime = end - start
print(exectime, exectime/100*1e6)
| threshold | total time (s) | average time (μs) |
|---|---|---|
| 1e0 | 0.09080 | 908.0 |
| 1e1 | 0.07787 | 778.7 |
| 1e2 | 0.07563 | 756.2 |
| 1e3 | 0.08248 | 824.8 |
| 1e4 | 0.07689 | 768.9 |
| 1e5 | 0.16393 | 1639.3 |
| 1e5 | 1.05565 | 10556.5 |
測試結果由 polling 勝出,interrupt 平均會花 700 μs 的時間,才能讓處理器知道可以接下去運行;如果使用 polling 的話,執行一結束 CPU 平均 60 μs 就讀到 register 更新了。
不確定打開 Interrupt Control 的 Fast Interrupt 會有多大影響,有機會來試試。
結語
這樣就把幾個玩 Xilinx 板子需要的基礎都講完啦。
只要能組合 AXI Lite, AHB,AXI Stream 跟 Interrupt,相信要連接大部分的 IP
都不成問題才對。