講完了 design constraint,這篇就要來介紹晶片下線時合成的龍頭老大 - Synopsys 的 Design Compiler 啦。
其實要寫這篇我是有點猶豫的啦,畢竟 Design Compiler 身為龍頭老大哪缺我這一篇介紹,
Cadence 也是有對應的下線工具 Genus,但就…我也只會 Design Compiler,如果 Cadence 願意贊助我上課的話我倒是願意幫忙寫一篇(欸。
Design Compiler 的工作
說穿了,合成工具就是把一般我們寫的 RTL 電路,轉換成各種 and, or, xor, oai 等邏輯閘實現的實作。在轉換的過程中,合成工具也會幫我們注意 PPA:
- Performance,怎麼樣合成邏輯閘以達成設計的頻率
- Power,怎樣合成最省電
- Area,怎樣合成的晶片面積最小
三個限制當中,Performance 的優先度是最高的,做不到想要的頻率,面積很小功耗很低也沒用,
我想應該不會有人接受買了 i9 但跑起來像是 pentium 4。
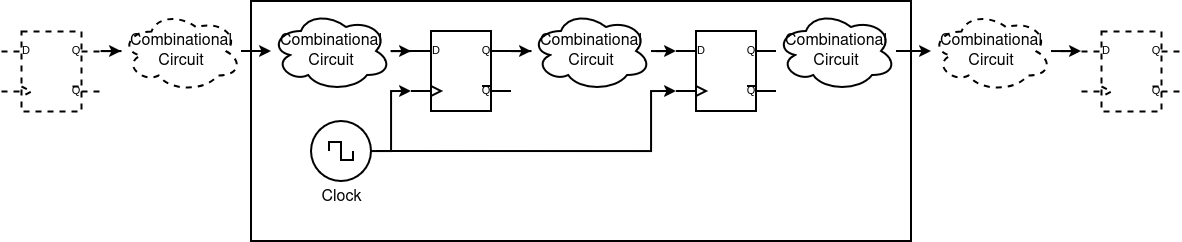
讓我們把上一篇的圖再拉出來,要好好設定 Design Compiler 對 Design Constraint 的了解是不可或缺的,建議大家可以把上一篇的 Design Constraint
多看個幾遍。
轉換成邏輯閘之後,合成工具就會開始做時序檢查,每個 Register 間都是一條 Path,合成工具會檢查是不是每條 path
的 Delay 都能符合 Timing Constraint,以下舉幾個合成工具會做的事:
- path 太慢,會調整邏輯閘,用面積去換 Performance,換面積更大時序更快的電路來符合時序要求。
- path 太快,在中間插入 buffer,加一點時間讓 hold time 足夠。
- DRV 的狀況,如 fanout 太多、capacitance 太大,插入 buffer 讓後續推得動。
- 用性能換面積,在 Path 符合要求的情況下,選用面積小但比較慢的電路,保住時序要求又能減少電路面積。
- 在高階製程中 會提供不同 Vt 的元件 ,高 Vt (HVT)的元件會比較慢但漏電少、低 Vt (LVT) 則是較快但漏更多電,合成工具會在緊要路徑上選用 LVT 元件達成時序要求,其他路徑則會用 RVT 或 HVT 元件降低功耗。
Design Compiler 環境設定
Design Compiler 的設定檔是 .synopsys_dc.setup,會依照下列的順序進行設定
- 系統設定:位在 $SYNOPSYS/admin/setup `內的 .synopsys_dc.setup。
- 個人設定:位在使用者家目錄下的 .synopsys_dc.setup。
- 專案設定:工作目錄下的 .synopsys_dc.setup。
通常 1 是系統管理者設定的,會是安裝時與軟體版本相關的設定文件;2 是個人的設定;3 則是每個工作目錄獨有的,例如製程等相關的設定。
設定相衝突的話,個人設定會蓋掉系統設定,專案設定會蓋掉個人設定。
目前由於個人只會用一種製程,所以全部都用個人設定而不用專案設定,如果你的電腦上很奢侈的有多種製程可以選,那就可以切換為專案設定。
.synopsys_dc.setup 的內容如下:
set search_path "."
set search_path "/path/to/synopsys/db $search_path"
set search_path "/path/to/memory/db $search_path"
set target_library "\
core_rvt_tt.db \
core_rvt_ff.db \
core_rvt_ss.db"
set link_library"\
* \
memory_tt.db \
memory_ff.db \
memory_ss.db \
io_tt.db \
io_ff.db \
io_ss.db \
$target_library"
set symbol_library "generic.sdb"
set synthetic_library "dw_foundation.sldb"
set verilogout_no_tri true
set hdlin_enable_presto_for_vhdl "TRUE"
set sh_enable_line_editing true
history keep 2000
下面就依序解釋這幾個項目的意思:
search_path
尋找 .v 以及 .db 的路徑,一個是我們設計晶圓廠會提供製程中 standard cell 的 db 檔;另外我們要為晶片中使用的 memory 生成 db 檔,把這些路徑都加入 search_path 中。
為了避免混淆,我習慣會把 standard cell 的 db 檔跟記憶體分開來加入 search_path。
target_library
合成用的邏輯閘的元件庫,由晶圓廠提供,合成工具會使用 target_library 裡的元件進行合成。
例如你寫了一個 operator +,target_library 內提供了 xor 跟 and,合成工具就會用 xor 跟 and 實作出你要的 operator +;
但如果你 target_library 裡面只提供 nand,那合成工具就只會用 nand 來堆出 operator + 無痛達成 Nand2Tetris。
先前提過的 HVT, RVT, LVT,一般是選用 RVT 進行合成,並在 layout 的時候由 layout 工具進行替換,合成時只要加入 tt, ff, ss 等邊界條件即可(這部分沒那麼肯定,有前輩知道的話麻煩指正)。
link_library
連結用的的元件庫,合成工具在把你的設計讀入之後,需要在 link_library 裡面找到所有元件的定義,一般會在這裡加入不需要合成的元件,包括下面幾個:
- * 表示從 design compiler 已經讀入的記憶體去找
- target_library 的內容
- 用工具產生的 memory macro
- IO Pad
- 其他各種 macro
這裡特別說明一下 target_library 跟 link_library 的不同 ,target_library 是合成時 mapping 用的,link_library 則是合成後必須要找到參考的對象。雖然機率不太高, 但如果你把 IO Pad 加入 target_library ,設計的一部分又太奇葩,合成工具有機會用 IO Pad 的 cell 來組合你的電路。
如果用軟體的角度來理解的話,target_library 就像定義了許多基本的 assembly 指令,在編譯的時候會用這些 assembly 指令實作高階語言;
link_library 則是定義一些特殊的 assembly,如果你的電路裡直接寫了一些特殊的 avx 指令,就需要 link_library 提供 avx 指令的定義。
當然,會看到我把整個 target_library 加到 link_library 裡面,因為基本的指令在合成後也要被 design compiler 看到,不然也跳警告或錯誤。
symbol_library
這是開圖形化介面需要的,定義元件在 schemetic 上要怎麼顯示;如果晶圓廠沒提供的話, 使用 design compiler 提供的 generic.sdb 應該就夠用了,頂多有些元件可能變成空洞的小正方形。
synthetic_library
合成函式庫,告訴合成工具一個高階功能要怎麼對應到實際的邏輯閘,dw_foundation 的 dw 指的是 synopsys 的 DesignWare
,例如裡面就定義了 2, 3, 4, 5, 6 級 pipeline 的乘法器如何合成,還有許多其他的 IP block。
如果有買特殊的 IP,或是某些高階的合成方式,就要把 .sldb 填在這裡。
Design Compiler 跑起來
執行 Design Compiler 有幾種方式,一種是使用圖形介面:
dv
Design Compiler 圖形介面可以做很多事,例如圖形化檢視 design compiler 如何分析你的設計。
另一種是文字介面,如下節所示,我基本上是一套 script 走天下:
dc_shell
dc_shell -f compile.tcl # 執行 compile.tcl
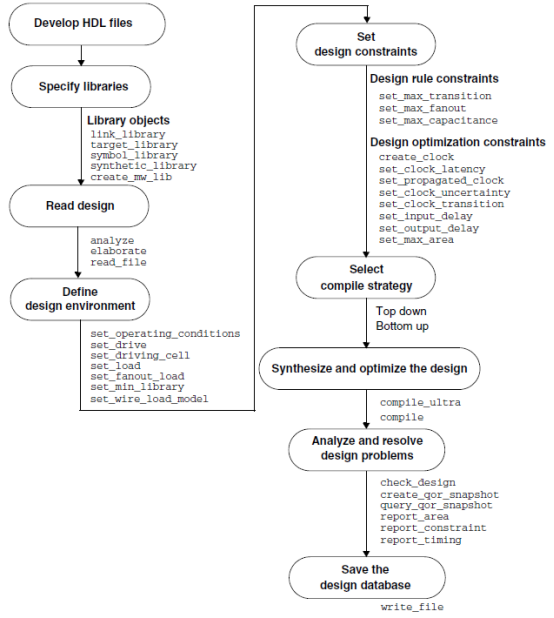
合成工具的使用步驟(也就是 script 的內容)大致分為如下幾個步驟:
- 讀入設計
- 設定 constraint
- 執行編譯
- 輸出結果
Synopsys 官方有提供一張圖,估且做個參考:
讀入設計
讀入設計的部分,design compiler 是使用類似 vcs 的三步驟做法:
第一步使用 analyze 讀入設計 analyze -f sverilog -vcs "-f chip_top.f"
可以讀入 verilog, sverilog, vhdl 三種格式的設計;讀入檔案使用 vcs 的格式,下面是 chip_top.f 的內容:
// top
src/define.sv
src/chip_top.v
src/block_wrap.sv
// add project top directory as include path
+incdir+projdir
-f proj.f
除了 top 連接之外,其他模組都單獨寫一個 .f 檔,透過 chip_top.f 中加入 -f 包含進來。
在 proj.f 中一樣,把所有需要的 .sv 檔寫進去,如果你的設計有更多不同的 block,只要增加 .f 檔即可。
第二步 elaborate,這步做設計的分析,
elaborate $toplevel
從 $toplevel 模組去分析你的設計,把整個設計連結在一起,看看設計裡面有什麼東西。
analyze 的時候 design compiler 會將你的設計轉為 .pvl 和 .syn 兩種檔案,都是 design compiler 特有的 binary
檔案,只要知道它是某種 design compiler 可以更快讀入設計的格式即可。
如果覺得現下工作目錄一堆 .pvl .syn .mr 檔很煩的話,可以參考使用:
mkdir work
define_design_lib $top_level -path work
把這些中繼檔丟去 work 資料夾內(其實我之前都沒用這個,寫這篇文才知道可以這樣用)
elaborate 的輸出,最重要的是下面的資訊:
Inferred memory devices in process
in routine DMA line 161 in file
' . ./DMA.sv
==========================================================================
| Register Name | Type | Width | Bus | MB | AR | AS | SR | SS | ST |
==========================================================================
| input_data_reg | Flip-flop | 256 | Y | N | Y | N | N | N | N |
==========================================================================
這裡的意思是,在這個檔案裡推論出一個 Flip-flop,後面列出的則是對應的屬性:
- Type: Flip-flop 或是 latch
- Width/Bus: 單一 bit 或是多個 bit 組合
- MB: multibit,這個我沒開設定時都不會推論出 multibit,詳細可能要另外拉另一篇文章 出來講了
- AR/AS: Asynchronous Reset 與 Asynchronous Set,透過 asynchronous 信號設定 register 內容為 0 或 1。
- SR/SS/ST: Synchronous Reset, Synchronous Set, Synchronous Toggle,透過 synchronous 信號設定 register 內容為 0, 1 或反向。
這裡最重要的就是先檢查有沒有語法上的錯誤導致 elaborate 失敗,再來是看看有沒有推導出 Latch 就可以了。
設定 constraint
請參考下面的 TL;DR 的 script ,以及熟讀上一篇 Design Constraint 。 設定完 constraint 之後可以使用 check_timing 檢查設定有沒有問題。
執行編譯
在 design compiler 下 compile 指令開始進行合成。
我也不懂它背後到底做了多少事情,下面就節錄 log 的大標題,寫一下我大概知道的部分:
Beginning Implementation Selection
首先 design compiler 會先用 DesignWare 裡面的 block 替換掉你設計中的部分,例如把加法代換成 DesignWare 提供的邏輯閘實作,這在 design compiler 裡叫 Mapping。
Beginning Mapping Optimization
第一次的最佳化,這裡會第一次看到下表:
| ELAPSED TIME | AREA | WORST NEG SLACK | TOTAL SETUP COST
| DESIGN RULE COST | ENDPOINT | MIN DELAY COST |
- Elapsed time:目前的執行時間
- Area:目前設計的面積
- Worst Negative Slack (WNS):所有 Setup time 違反設計規則路徑中,違反最大的差距值
- Total Setup Cost:有些工具像 Xilinx Vivado,會稱這格為 Total Negative Slack (TNS), 這是把所有的 slack 經過加權後的總和值,就描述上來看可能包含 max_path (setup) 與 min_path (hold) 的 slack
- Design Rule Cost:design rule 上,現下設計與使用者設定目標的差距值
- Endpoint:當 design compiler 開始進行最佳化的時候,當下最佳化的點會寫在這裡,當修復 delay violation 時,會寫出修復的邏輯閘 (cell) 或埠 (port);如果修復的是 design rule,會寫出修復的走線 (net)
- Min Delay Cost:這個是 min_path 上的 TNS。
一開始合成時很多設計指標如 WNS 面積都很大,但不用單心,很快就會降下來。
Beginning Delay Optimization Phase
WNS 跟 timing constraint 有關,在合成結束的時候一定要降到 0,而 TNS 是 WNS 的加權總和,也應該要降到 0。
如果 WNS 降不下來,就要考慮改設計或是放寬 timing constraint 然後重新合成。
Beginning Design Rule Fixing
可能要修復的 design rule 包括 (min_path) (min_capacitance) (max_transition) (max_capacitance)。
修正完最重要的 delay,再來會會插入 buffer 去修復 design rule,不一定會修到 0。
如果設定了 set_fix_hold ,這步會開始出現 Min Delay Cost
Beginning Area-Recovery Phase
開始面積最佳化,一般面積的最佳化目標是 0,愈小愈好,讓 design compiler 自己做到放棄就好;從這個順序也可看出,
對 design compiler 來說,最重要的就是先解決 timing (delay) 的問題,再來修 design rule,最後再來顧面積;
另外無論 design rule 跟面積最佳化做了什麼,導致 WNS 曾經脫離 0,都會修正回去。
有設定 set_fix_hold 的話也會在這步開始插入 buffer,就我個人的經驗這個插 buffer 還滿慢的,
覺得太久也可以放棄這步,讓 layout tool 修正就好。
Optimization Complete
該做的都做完了,結束 compile。 如果想再做更進一步用 HVT 做power 最佳化,可以加上指令
set_leakage_optimization true
compile -inc
來完成。
輸出結果
Design Compiler 在合成完成之後(通常就是 script 跑下去,然後去看兩集動畫就會合成完了),再來只要確定兩件事即可:
第一是把合成結果寫出來,總共有四個:
- 合成完設計的 ddc 檔,未來可以再讀入進行最佳化,例如抽換為 HVT device,甚至換到新製程上
- 寫出 standard delay format (.sdf) 資訊,這個檔案記錄了電路中各節點到另一個位置的 delay,在 post-synthesis 的模擬會需要用到
- 寫出合成結果,以邏輯閘打造的 .v 檔,一般我會叫 .syn.v 表示這是合成過的
- 寫出 constraint 檔 (.sdc),使用 INNOVUS 進行 layout 時會需要
第二是輸出 design compiler 合成的報告,下面 TL;DR script 會固定輸出一堆報告,重要的大概有幾個:
- 檢查 max_timing 與 min_timing 報告,確定沒有 timing violation
- area report 可以看看每個 cell 使用的面積,決定你的設計哪裡需要最佳化
- latch report 再次確認電路裡沒有 latch
- power report 看看 design compiler 預告合成後電路的功耗是多少,由於 design compiler 沒有 clock tree 的資訊,這個功耗會比 layout 完成後,由 layout 軟體或是 PrimeTime 估得要少,我的經驗從最終結果的 52% 到 71% 不等(當然量測又量到比 design compiler 估得功耗更小那就是另一個故事了)
TL;DR
以上就是 design compiler 如何用以及它做了什麼的介紹,不過我知道很多人如果跑進來,很有可能是第一次使用 Design Compiler,又或者是死線將近要趕快開始合成,這個時候什麼都不想看只想趕快拿到一個可以用的 design compiler script 開始跑。
這些小弟都懂,以下附上我合成用的 script,反正可能有 >50% 也是從其他網站抄來的,對以下 script 來源還找得到的,我就在這裡附上:
- 基礎架構來自 Washington University 的上課講義 Tutorial for Design Compiler 。
- STOP_HERE 來自 CSDN DC/PT在任意位置停止执行脚本的方法 。
- Output 第一節的 naming rule,應該部分來自於 IThome DC 個人筆記 。
至少小弟可以確定,用這套 script 合成、製作的晶片,最終是符合預期有量到的,也許可以讓各位直接複製的看倌們放心一些。
read_file.tcl
第一個部分是 read_file.tcl,elaborate 這步稍花時間,如果沒改設計也不用重新讀入,因此特別分一個 read_file.tcl 出來,生成原始的 .ddc 檔供後續使用。
########################################
# User Defined Parameters #
########################################
# Set the top module of your design
set toplevel chip_top
# set the filelist
set filelist chip_top.f
set sh_continue_on_error false
set compile_preserve_subdesign_interfaces true
define_design_lib work -path work
########################################
# Read in Verilog Source Files #
########################################
analyze -f sverilog -vcs "-f $filelist"
elaborate $toplevel
set filename [format "%s%s" $toplevel "_raw.ddc"]
write -format ddc -hierarchy -output $filename
compile.tcl
第二部分就是真正編譯的部分,要改動的有幾項:
- set_operating_conditions 與 set_wire_load_model 請改成真正使用的 library。
- Constraint 的部分請自己改想要的數字,至少要改 clock 與 input/output delay。
- 這裡我會在第一次編譯之前,會先反註解 STOP_HERE,檢視一下 check_timing 跟 report_net_fanout 的輸出,第一看看 timing 有沒有問題,第二看看還有沒有 high fanout 要加進 set_ideal_network 裡的。
- set_fix_hold 是用來指定修復 hold issue,可放可不放,放了 design compiler 可能會花很多時間插入 buffer 修復 hold time issue,但這些 buffer 隨後在 layout 時就會全部被移除掉。
- 一般我會先把 effort 設定成 medium,先跑過一次合成,確定沒問題再用 high 去挑戰極限;當然兩者的能力也有差,我有一個 400 MHz 的合成,用 medium 的話 WNS 只能收斂到 0.1,high 就能順利降到 0。
- set_timing_derate 我還沒嘗試過,它的目的是在合成時先插入 10% 的 delay,讓設計面對製程變異可以更強健,但我記得設下去會跑出一些合成問題。
########################################
# User Defined Parameters #
########################################
# Set the top module of your design
set toplevel chip_top
# set the filelist
set filelist chip_top.f
set sh_continue_on_error false
set compile_preserve_subdesign_interfaces true
# compile design (medium or high)
set effort high
# Set the clock period
set period 2
set waveform [list 0 [expr {$period * 0.5}]]
set io_delay [expr {$period * 0.6}]
########################################
# Read in Verilog Source Files #
########################################
# analyze -f sverilog -vcs "-f $filelist"
# elaborate $toplevel
set filename [format "%s%s" $toplevel "_raw.ddc"]
# write -format ddc -hierarchy -output $filename
read_ddc $filename
current_design $toplevel
########################################
# Define constraints #
########################################
set_operating_conditions -min <ff.lib> -max <ss.lib>
set_wire_load_model -name Tiny -library <ss.lib>
# 100 MHz main clock
create_clock -period 10 -waveform ${waveform} -name clk [get_ports clk]
set_fix_hold [get_clocks clk]
set_dont_touch_network [get_clocks clk]
set_ideal_network [get_ports clk]
# reset and clock gating
set_ideal_network [get_ports rstn]
set_clock_uncertainty 0.2 [get_clocks clk]
set_clock_latency 1 [get_clocks clk]
set_input_transition 0.5 [all_inputs]
set_clock_transition 0.1 [all_clocks]
set_drive 0.1 [all_inputs]
set_load 20 [all_outputs]
set_input_delay -clock clk -max ${io_delay} [remove_from_collection [all_inputs] [get_ports "clk"]]
set_input_delay -clock clk -min 0 [remove_from_collection [all_inputs] [get_ports "clk"]]
set_output_delay ${io_delay} -clock clk [all_outputs]
# set_timing_derate -late 1.10 -cell_delay [get_cells -hier *]
check_timing
report_net_fanout -high_fanout
# STOP_HERE
########################################
# Design Compiler settings #
########################################
# max_area
set_max_area 0
set_fix_multiple_port_nets -all -buffer_constants [get_designs *]
compile -exact_map -boundary_optimization \
-map_effort $effort \
-area_effort $effort \
-power_effort $effort
# power optimization
# set_leakage_optimization true
# compile -inc
########################################
# Output files #
########################################
set bus_inference_style {%s[%d]}
set bus_naming_style {%s[%d]}
set hdlout_internal_busses true
change_names -hierarchy -rule verilog
define_name_rules name_rule -allowed "A-Za-z0-9_" -max_length 255 -type cell
define_name_rules name_rule -allowed "A-Za-z0-9_[]" -max_length 255 -type net
define_name_rules name_rule -map {{"\\*cell\\*" "cell"}}
define_name_rules name_rule -case_insensitive
change_names -hierarchy -rules name_rule
# save design
set filename [format "%s%s" $toplevel "_opt.ddc"]
write -format ddc -hierarchy -output $filename
# save delay and parasitic data
set filename [format "%s%s" $toplevel ".sdf"]
write_sdf -version 2.1 -load_delay net $filename
# save synthesized verilog netlist
set filename [format "%s%s" $toplevel ".syn.v"]
write -format verilog -hierarchy -output $filename
# this file is necessary for P&R with Encounter
set filename [format "%s%s" $toplevel ".sdc"]
write_sdc $filename
redirect [format "%s%s" $toplevel _design.repC] { report_design }
redirect [format "%s%s" $toplevel _area.repC] { report_area }
redirect -append [format "%s%s" $toplevel _area.repC] { report_area -hierarchy }
redirect [format "%s%s" $toplevel _reference.repC] { report_reference }
redirect [format "%s%s" $toplevel _latches.repC] { report_register -level_sensitive }
redirect [format "%s%s" $toplevel _flops.repC] { report_register -edge }
redirect [format "%s%s" $toplevel _violators.repC] { report_constraint -all_violators }
redirect [format "%s%s" $toplevel _power.repC] { report_power }
redirect [format "%s%s" $toplevel _max_timing.repC] { report_timing -delay max -nworst 3 -max_paths 20 -greater_path 0 -path full -nosplit }
redirect [format "%s%s" $toplevel _min_timing.repC] { report_timing -delay min -nworst 3 -max_paths 20 -greater_path 0 -path full -nosplit }
redirect [format "%s%s" $toplevel _out_min_timing.repC] { report_timing -to [all_outputs] -delay min -nworst 3 -max_paths 1000 -greater_path 0 -path full -nosplit}
# STOP_HERE
結語
以上就是小弟目前所知 Design Compiler 相關的使用方法和內部的一些資訊,最後並附上我現下合成用的 script,希望對各位看倌有幫助。
另外提一下,Cadence 的 Genus synthesis solution 我沒碰過沒辦法寫介紹文,但據一些不可靠的消息來源,據說 Genus
現在的表現己經比 Design Compiler 好了,Synopsys 加油好嗎不要只會買東西。